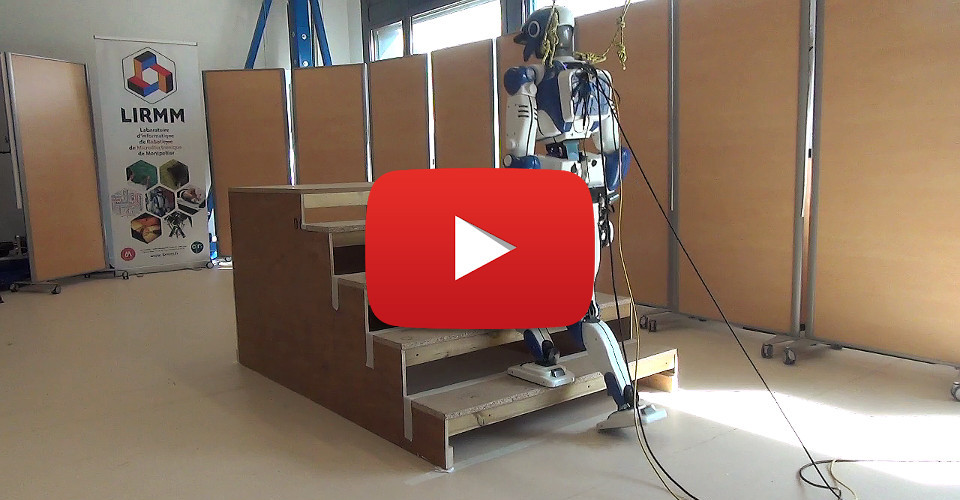
Source code of the walking and stair climbing controller used in the experiments of Stair Climbing Stabilization of the HRP-4 Humanoid Robot using Whole-body Admittance Control, as well as in an industrial demonstrator at the Airbus Saint-Nazaire factory.
- Installation instructions
- Wiki for guides and troubleshooting
- API documentation
The controller has been tested on Ubuntu 14.04 (gcc/clang) with ROS Indigo and Ubuntu 16.04 (gcc) with ROS Kinetic. See the installation instructions on the wiki.
Compilation requires:
- ROS with a working catkin workspace
- SpaceVecAlg: spatial vector algebra
- RBDyn: rigid body dynamics
- eigen-lssol: quadratic programming (if you have the LSSOL licence ask us this library)
- eigen-qld: quadratic programming
- sch-core: collision detection
- Tasks: inverse kinematics
- mc_rbdyn_urdf: robot model loader
- copra: linear model predictive control
The following dependencies are not publicly released but available upon request to Pierre Gergondet:
- mc_rtc: robot controller library (includes mc_control, mc_rbdyn, mc_solver and mc_tasks)
- mc_rtc_ros: ROS tools for mc_rtc
- mc_rtc_ros_data: ROS environment and object descriptions for mc_rtc
Launch RViz for the JVRC-1 model by:
roslaunch lipm_walking_controller display.launch robot:=jvrc1Enable the controller in your mc_rtc configuration:
{
"MainRobot": "JVRC1",
"Enabled": ["LIPMWalking"]
}Finally, start the controller from your mc_rtc interface. Here is the example of a local Choreonoid simulation using the mc_udp interface:
cd /usr/local/share/hrpsys/samples/JVRC1
choreonoid --start-simulation sim_mc_udp.cnoid # in one terminal
MCUDPControl -h localhost # in another terminalYou should end up with the following windows:
 See the Graphical user interface page of the
wiki for further instructions on how to use this GUI.
See the Graphical user interface page of the
wiki for further instructions on how to use this GUI.
To @gergondet for developing and helping with the mc_rtc framework.