Prototyping robots for PyBullet (F1/10 MIT Racecar, Sawyer, Baxter and Dobot arm, Boston Dynamics Atlas, Cassie, Laikago and Botlab environment)
pip install pybullet
See also the PyBullet Quickstart Guide
Pictures of some of the robots:
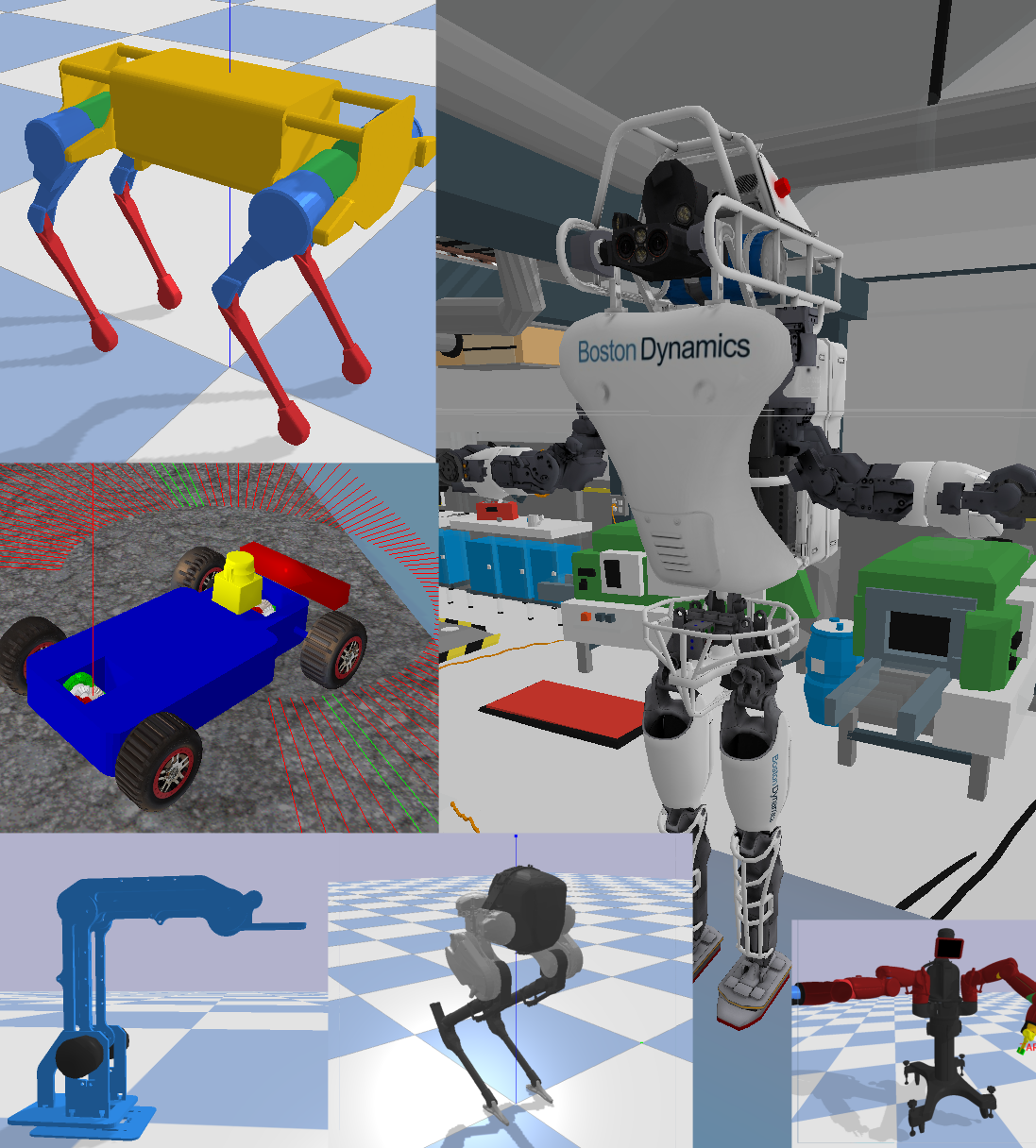
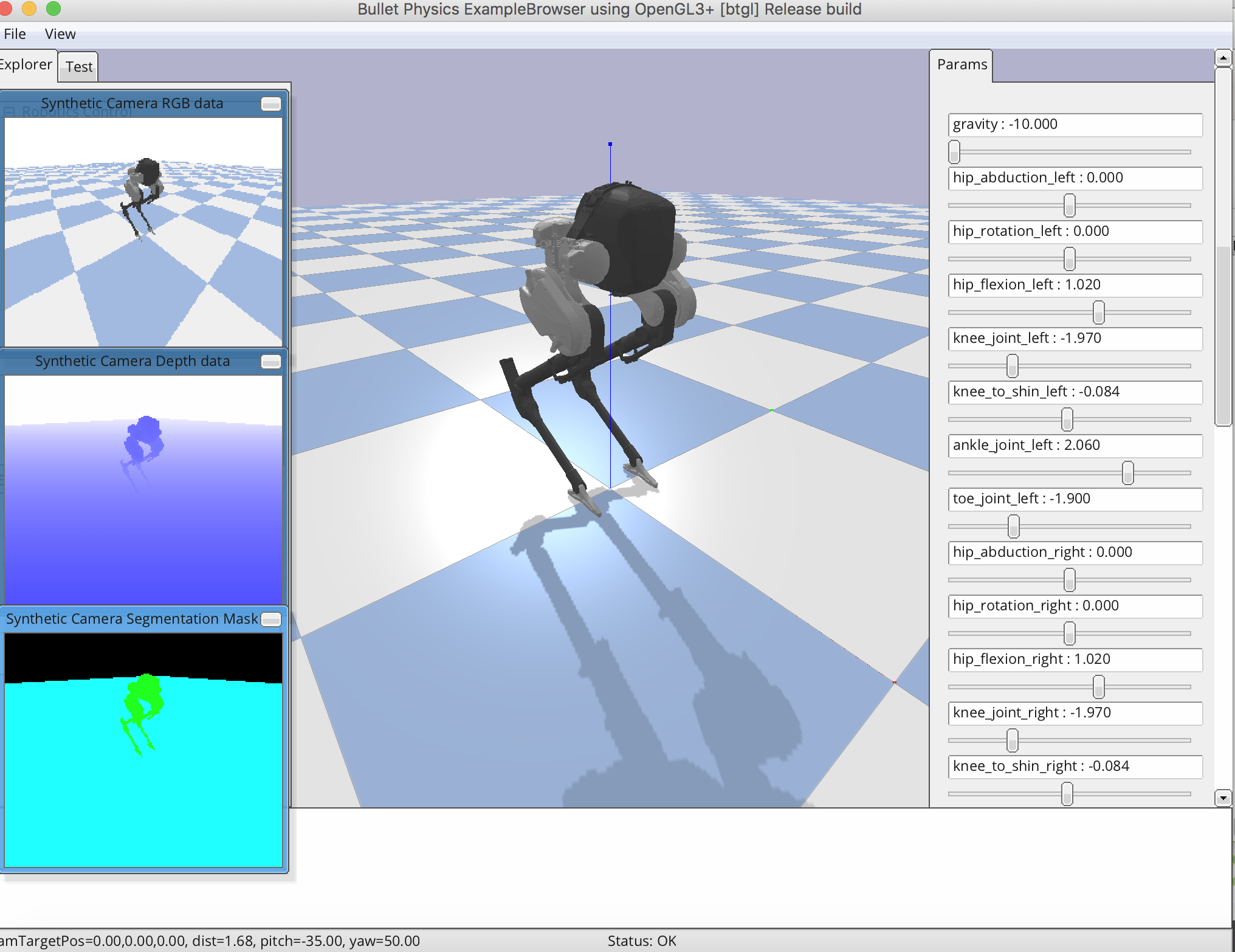
Cassie biped:
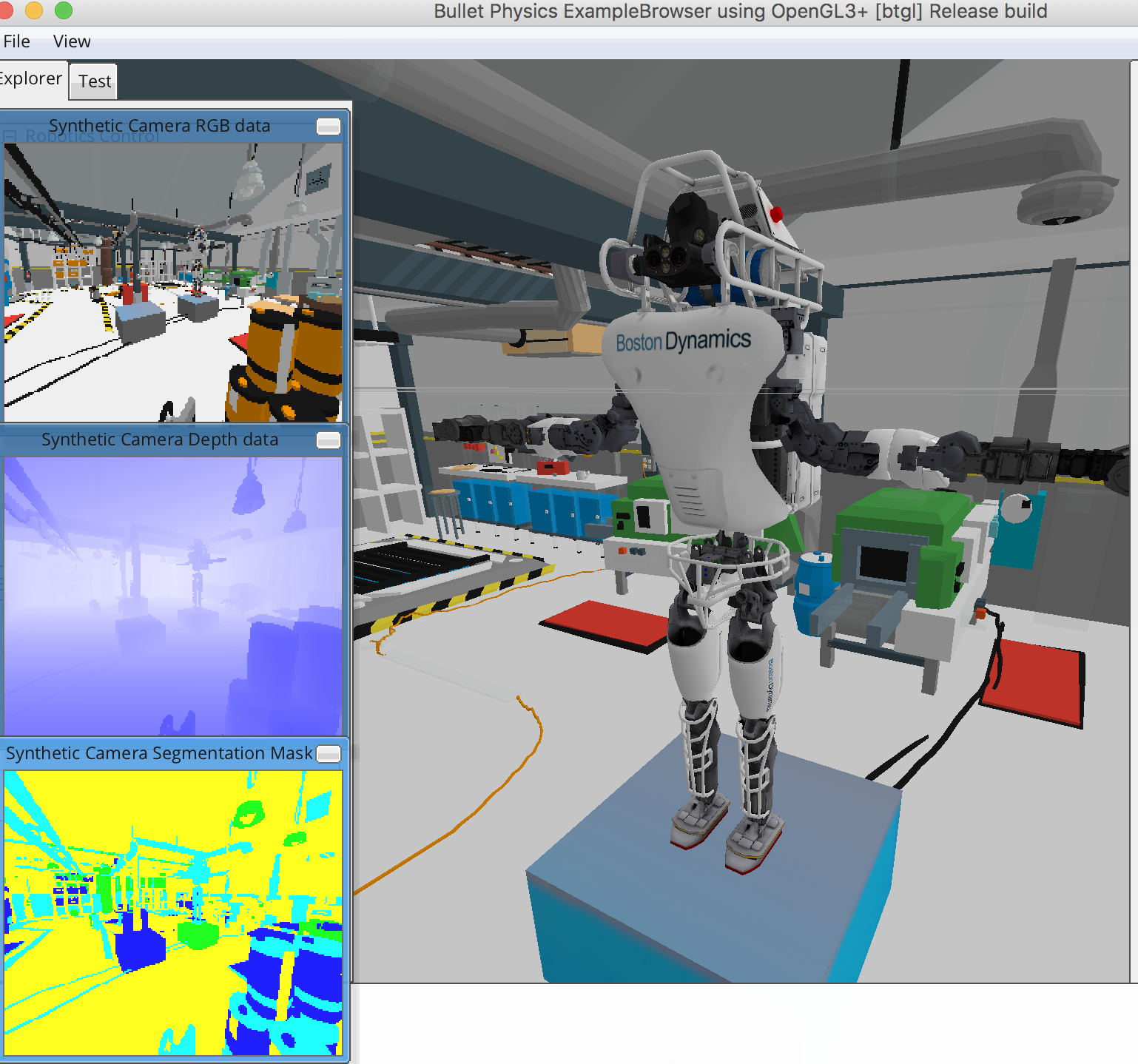
Boston Dynamics Atlas:
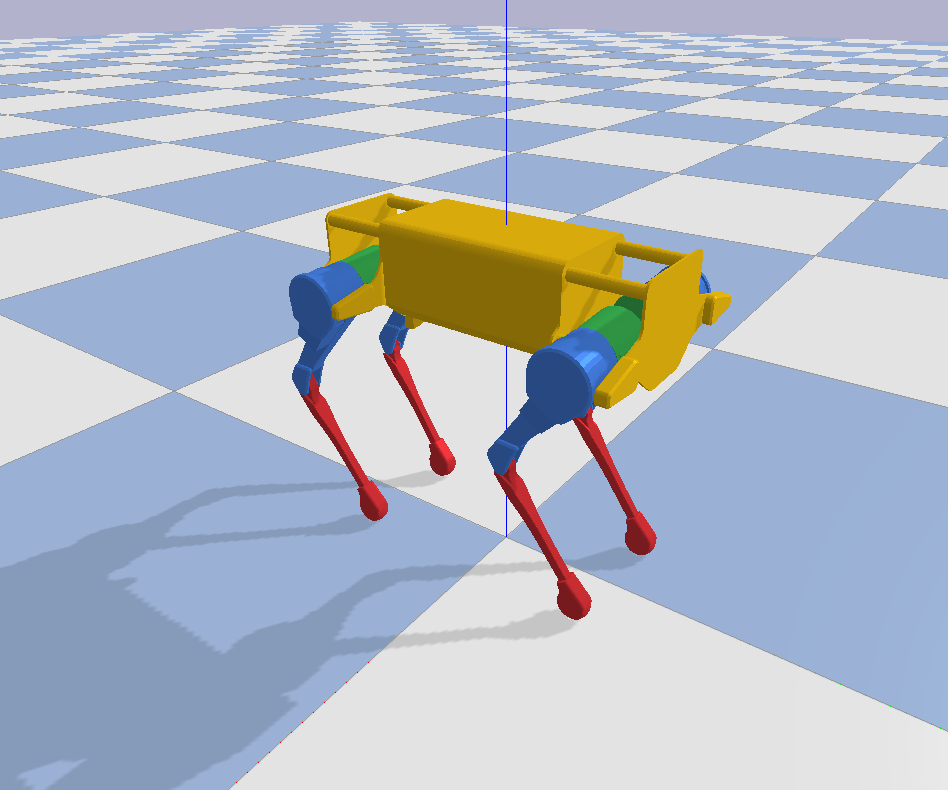
Unitree Laikago:
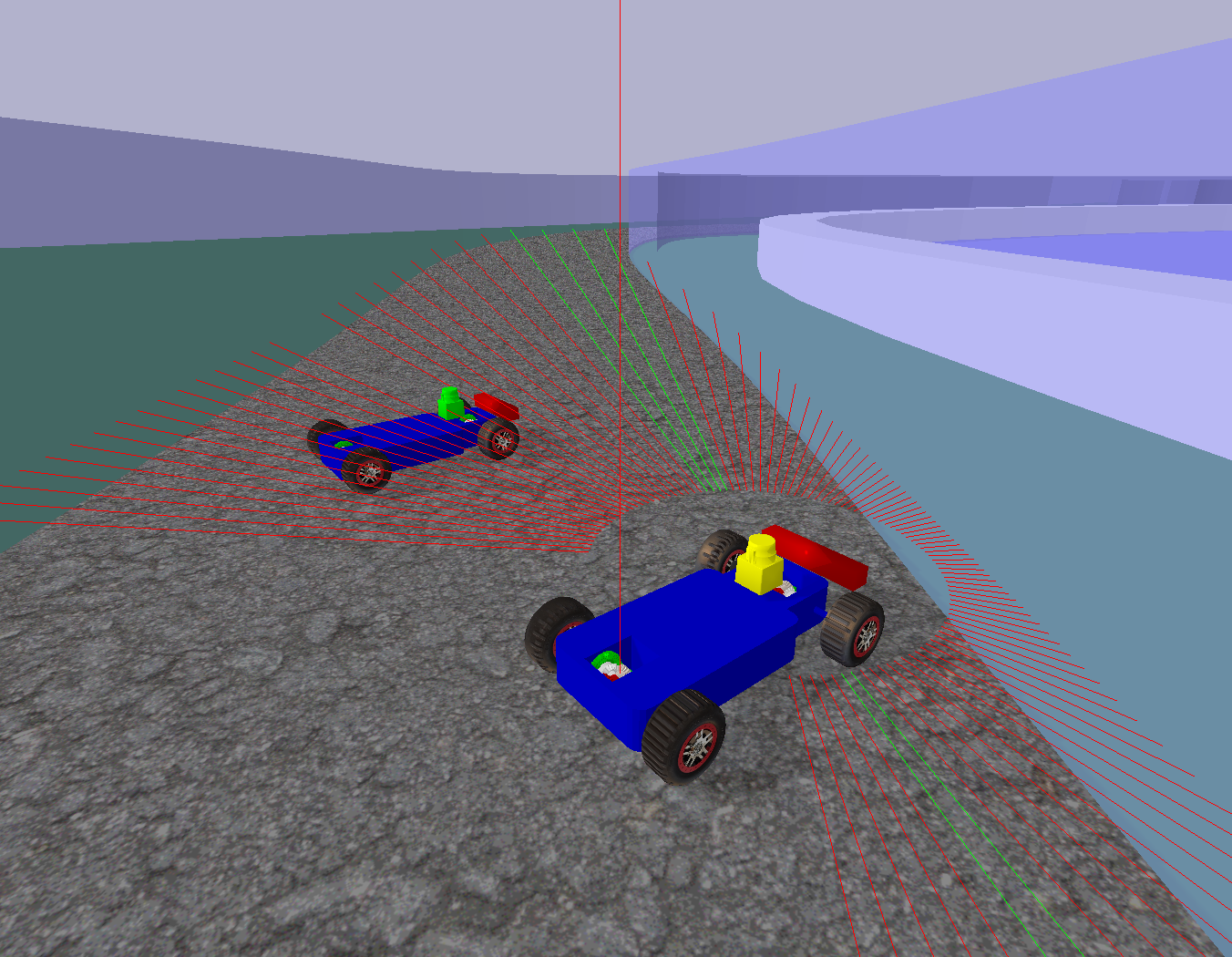
F1/10 Racecar:
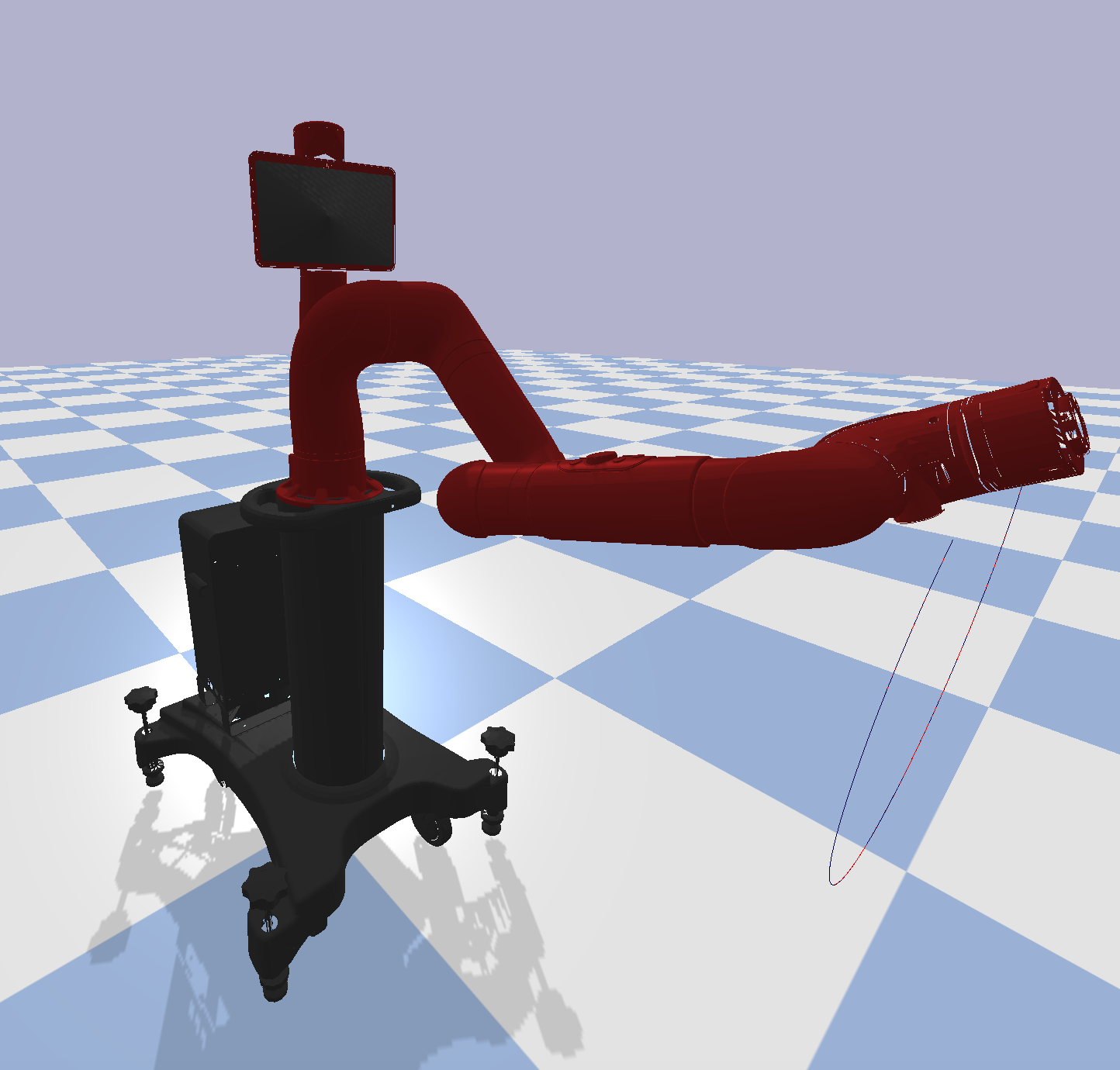
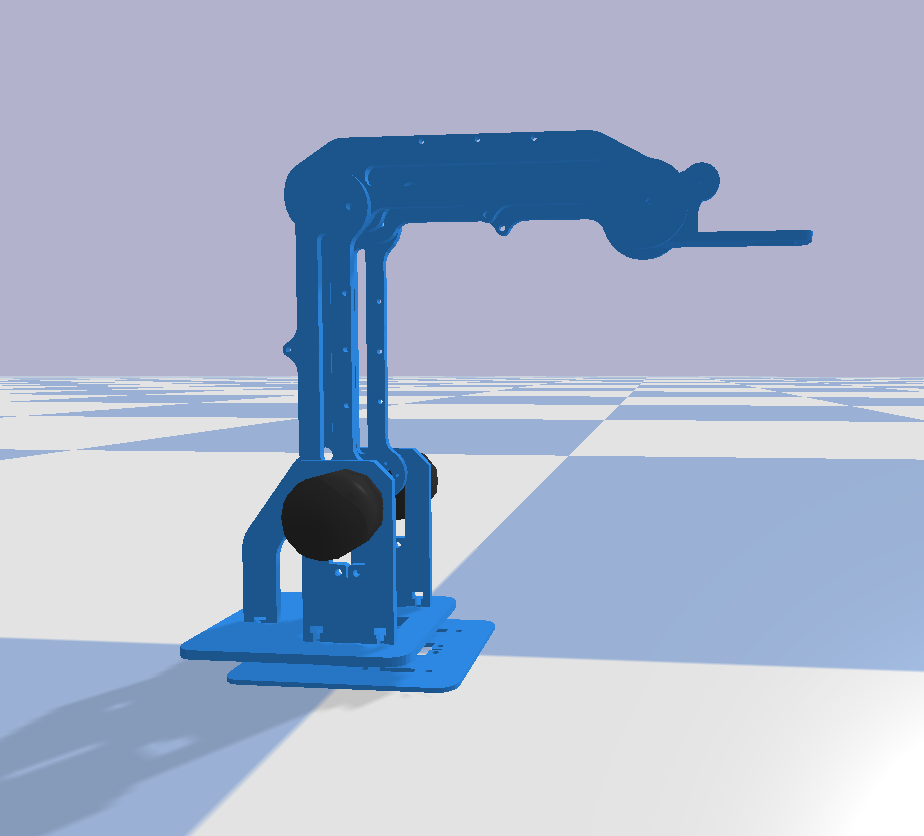
Dobot:
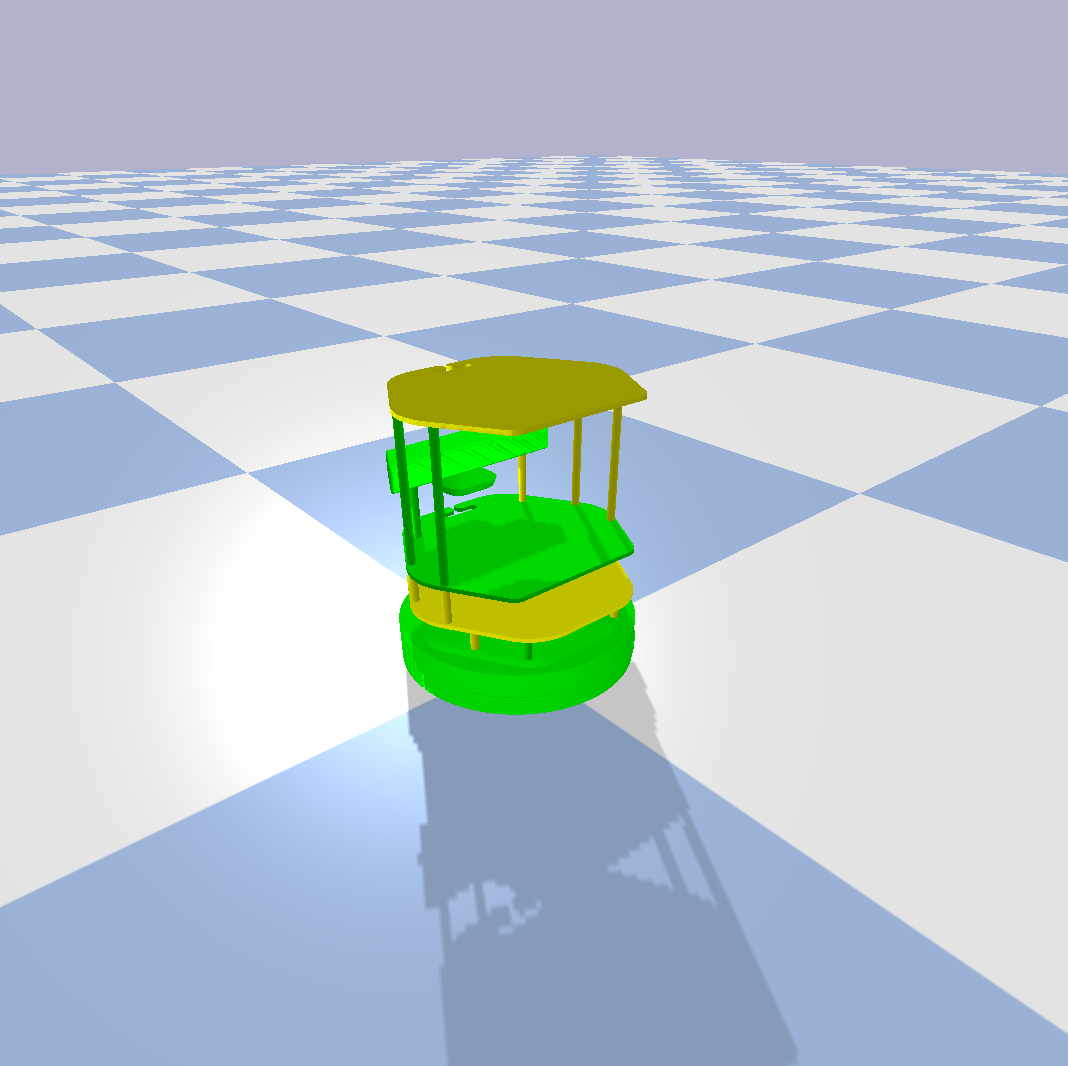
Turtebot:
Baxter:
Sawyer: