Data collection and post processing
It is possible to log observations to binary files and later post process these using RTKLIB (see below).
- To log observations set the param
log_observations_to_filein the driver launch file totrue - Per default observation binaries are stored in the directory:
~/.ros/and are named:<receiver_type>_<start_date_time>.sbp - To overwrite filename and directory set the following params in the launch file accordingly:
log_dirobservation_filename
- If a base station is available it is recommended to log its obervations as well and use its logged data for post-processing. Otherwise correction data from other providers like swipos work just as well.
- Connect to evaluation board using the Serial connection (USB)
- Enable
Standalone Loggingif not already enabled and choose file length. Save to Device- Plug in a USB thumbdrive to the USB port of the evaluation board.
- Open console
/opt/swift_console_v2.0.1_linux/console - Choose
Serial Device: /dev/ttyACM0 - Click on
CSV logandJSON log
swipos -> RINEX-Shop -> Start new order -> CORS -> Choose closest basestation -> Choose time (take GPS time = UTC + 18s = CET - 2h + 18s) (see https://confluence.qps.nl/qinsy/en/utc-to-gps-time-correction-32245263.html).
For post processing the SBP binary data it is necessary to first convert them to RINEX, then a PPK solution can be obtained using RTKLIB.
- Got to the resource library and download
sbp2rinexfor Linux - Unzip the file and move the executable
sbp2rinexto/usr/local/bin - Change the file permission to make it executable for all users:
sudo chmod 755 /usr/local/bin/sbp2rinex
It is recommended to use the most recent RTKLib version as the PPK quality increased dramatically in newer versions. Use at least version 2.4.3 (build 33)!
git clone [email protected]:tomojitakasu/RTKLIB.git
git checkout c6e6c03143c5b397a9217fae2f6423ccf9c03fb7
cd lib/iers/gcc
make
cd ../../../app
sudo make
# To make your life easier move the compiled binaries to `/usr/local/bin`:
sudo mv rnx2rtkp/gcc/rnx2rtkp pos2kml/gcc/pos2kml /usr/local/bin/.
sudo chmod 755 /usr/local/bin/rnx2rtkp /usr/local/bin/pos2kml- Alternatively RTKLib can be installed as apt package (not recommended):
sudo apt install -y rtklib
1. Convert SBP to RINEX
sbp2rinex FILENAME.sbp
2. Set setting in config file
To create a PPK solution a configuration file needs to be passed to RTKlib. The settings in the config file can have a major inpact on the final result of the solution.
- A example config file can be found under:
./utils/piksi_rtklib_postp/kinematic.conf
- A few important config options:
- pos1-frequency: Which frequency bands are used
- pos1-navsys: Constellations used for PPK. 63 should activate all.
- out-solformat: Format of output file results (llh = lat/long/alt, xyz = ECEF, enu = enu, nmea = usually not so great)
- out-timesys: Which timestamp the output has. Note GPST has an offset of approx. 18s to UTC. If solution is used with ROS later on, it is best to set to UTC as ROS is also UTC.
- ant1-postype: Coordinate format of the antenna base position (-l parameter). Best to use ECEF/xyz or LLH with many numbers after comma.
- Additional information about other config options can be found here
3. Create solution
rnx2rtkp rover_file.obs rover_file.nav rover_file.sbs base_file.18o -k kinematic.conf -o outfile.posThere are a few script in the repositories utils folder, which can help to obtain a PPK solution.
-
Create PPK solution, KML files for visualization and option to add solution to ROSbag (in development):
./utils/piksi_rtklib_postp/sbp2pos.sh
-
Converts positions from PPK solution to desired reference frame and adds them to ROSbag (in development):
./utils/piksi_rtklib_postp/pos2bag.py
-
Calculate different solutions and compare them on OpenStreetMap:
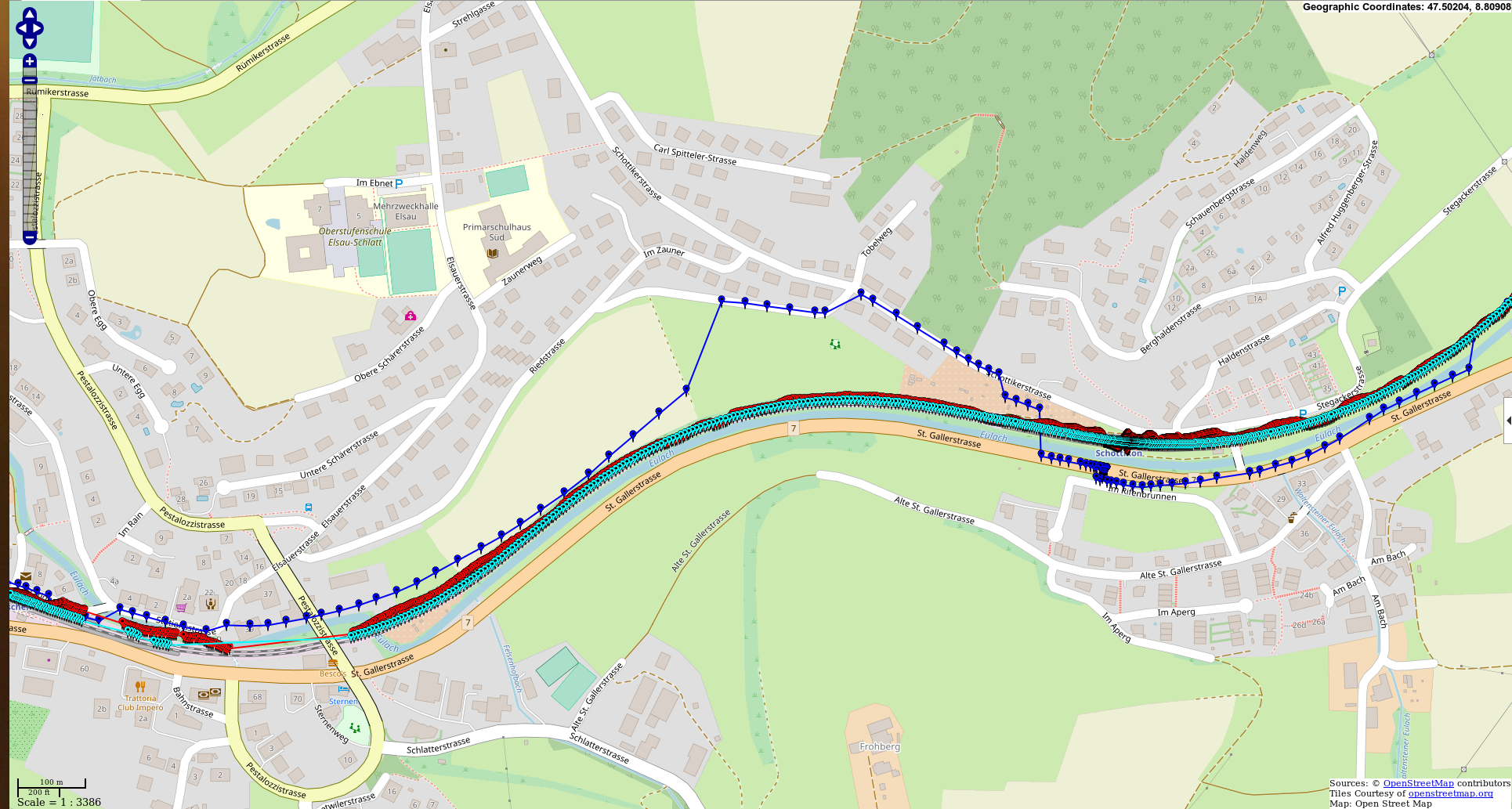
./utils/piksi_rtklib_postp/plot_gps.m
KML file created using sbp2pos.sh and imported to SwissTop maps from a MAV flight. Green corresponds to a "fixed" solution and yellow to a "float". Blue (not present) would indicate no dgps solution available.

Map created using plot_gps.m script. Red shows an online solution of the Piksi Multi, Cyan refers to the kinematic post-processed solution and blue is the solution from an iPhone X.