SHARK is a open-source and cost-effective mobile base solution for service robotics, developed for BUTIÁBots domestic robot (DoRIS) in Robocup@Home league.
Its development is also part of the Brazilian and Uruguayan collaborative research project, funded by the RoboCup Federation with the aim to enable and stimulate new researchers in this field.
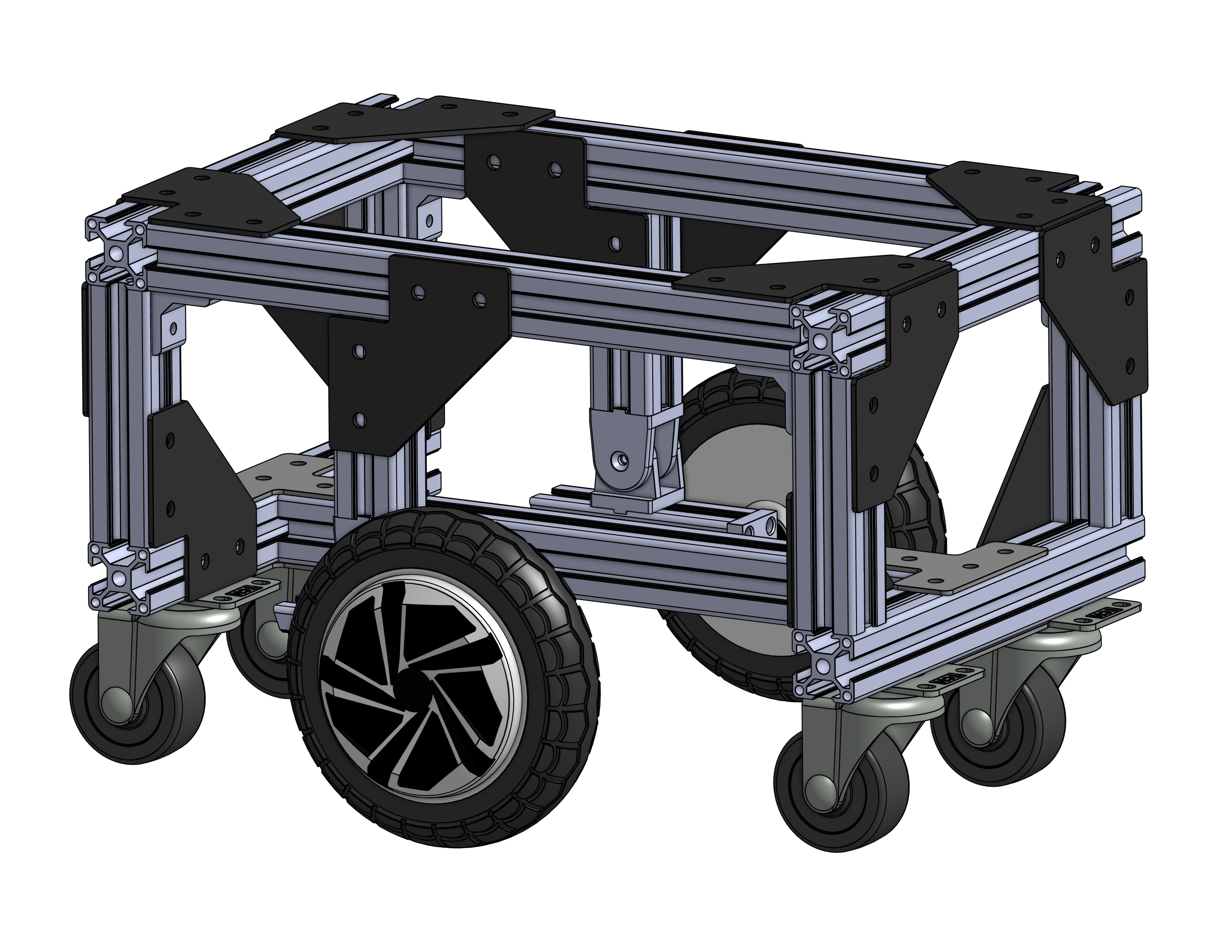
Click the image to access the ONSHAPE 3D model of the base
| Item | cost? | link? |
|---|---|---|
| Aluminum frame | 0.00 | link |
| Main Board | 0.00 | link |
| Auxiliary board | 0.00 | link |
| Wheels whit Brushless Motor | 0.00 | link |
| Battery charger | 0.00 | link |
| 36V battery | 0.00 | link |
| Suspension system | 0.00 | link |
Access wiki for the complete building tutorial
- Setting up URDF
Setting up URDF
- Setting up USB rules
Setting up USB rules
- Running test script
Running test script
Access common errors wiki page in case you face any problems