Using catkin_tools and wstool in a new workspace for ROS Indigo installed on Ubuntu 14.04:
source /opt/ros/indigo/setup.bash # start using ROS Indigo
mkdir -p ~/giskard_ws/src # create directory for workspace
cd ~/giskard_ws # go to workspace directory
catkin init # init workspace
cd src # go to source directory of workspace
wstool init # init rosinstall
wstool merge https://raw.githubusercontent.com/SemRoCo/giskard_examples/master/rosinstall/catkin.rosinstall
# update rosinstall file
wstool update # pull source repositories
rosdep install --ignore-src --from-paths . # install dependencies available through apt
cd .. # go to workspace directory
catkin build # build packages
source ~/giskard_ws/devel/setup.bash # source new overlay
Note, the above instructions have been tested to also work under ROS Kinetic installed on Ubuntu 16.04. Just replace any occurance of indigo with kinetic.
- For a trial using on the real robot, run this command:
roslaunch /etc/ros/indigo/robot.launch # on the robot
roslaunch giskard_examples pr2_interactive_markers.launch sim:=false # on your local machine - this will start rviz too
- For a trial using
iai_naive_kinematics_sim, run this command:
roslaunch giskard_examples pr2_interactive_markers.launch
- For a trial in
gazebo simulator, run these commands:
roslaunch pr2_gazebo pr2_empty_world.launch
roslaunch giskard_examples pr2_interactive_markers.launch sim:=false
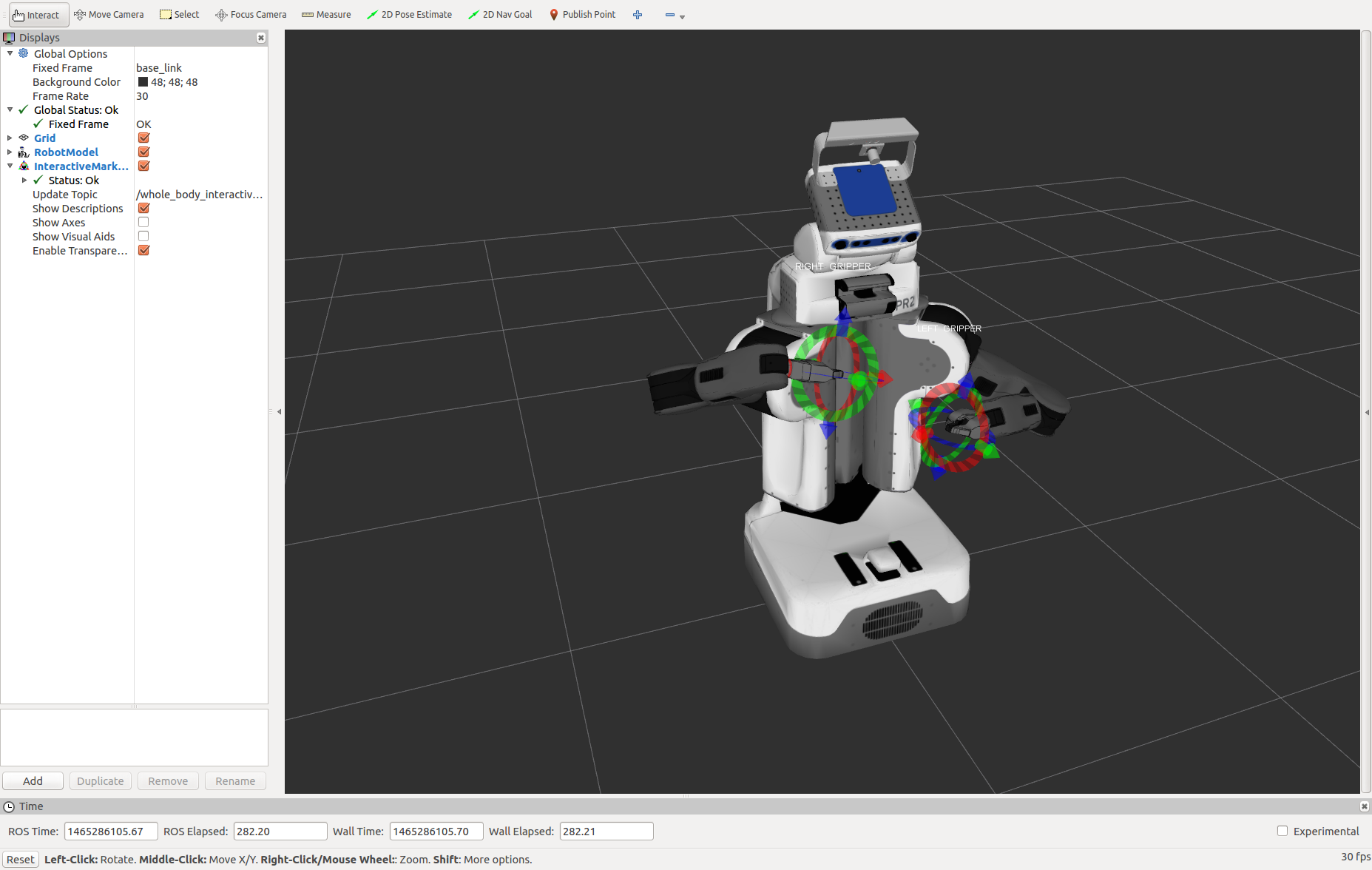
Use the interactive markers to give commands to controller controlling the both arms and the torso.
Additionally, there is a test-client which sends a sequence of goals to the upper-body-controller. You can start it by typing:
roslaunch giskard_examples pr2_test_action_server.launch
The test-client alternates joint goals and Cartesian goals for each of the arms. So, it is a great reference to see which type of command can be send to the action interface.
Acts as a convenience interface in front of the whole_body_controller. Added values is twofold: (1) offers action interface with its feedback- and cancelation-semantics, and (2) provides intelligent parsing of motion goals to meet the specific requirements of the whole_body_controller.
~move(giskard_msgs/WholeBody): Movement command to be executed. The server supports only one goal at a time, and provides the following intelligent parsing of motion goals:- Automatic transformation of all goal poses of type
geometry_msgs/PoseStampedinto the reference frame of the controller usingTF2. - Support of partial commands for body parts by using the previous commands for the respective body parts.
- Frequent publishing of internal monitoring flags, e.g. "left arm moving" or "right arm position converged " which determine succeeded movements.
- Automatic transformation of all goal poses of type
/tf2_buffer_server(tf2_msgs/LookupTransform): Connection toTF2buffer server to transform Cartesian goal poses.
~feedback(giskard_msgs/ControllerFeedback): Low-level feedback fromwhole_body_controller; used to determine when a movement goal succeeded.
~command(giskard_msgs/WholeBodyCommand): Command towhole_body_controller, repeated published at high frequency to kick watchdog inwhole_body_controller.
Several threshold parameters determine when a motion succeeded:
~thresholds/motion_old(Double): Duration (in seconds) required after which a motion goal is considered old.~thresholds/bodypart_moves/left_arm(Double): Speed threshold (in rad/s) for the fastest joint of the left arm to consider it moving.~thresholds/bodypart_moves/right_arm(Double): Speed threshold (in rad/s) for the fastest joint of the right arm to consider it moving.~thresholds/bodypart_moves/torso(Double): Speed threshold (in rad/s) for the torso joint to consider it moving.
A set of identifiers are used to associated the feedback from the whole_body_controller with the respective body parts.
~body_controllables/left_arm(List of Strings): Names of controllable variables that form the left arm of the robot.~body_controllables/right_arm(List of Strings): Names of controllable variables that form the right arm of the robot.~body_controllables/torso(String): Name of controllable variable making up the torso of the robot.
Finally, there are a couple of parameters which influence the behavior of the node:
~frame_id(String): Reference frame (known toTF) into which all Cartesian goal poses shall be transformed.~l_frame_id(String): Reference frame (known toTF) of the left end-effector for Cartesian commands.~r_frame_id(String): Reference frame (known toTF) of the right end-effector for Cartesian commands.~update_period(Double) Time (in seconds) between updates, i.e. feedback publishes to client and commands publishes towhole_body_controller.~server_timeout(Double): Time (in seconds) after which the server aborts in case it fails to initialize its action interface.