Thermal infrared cameras are increasingly being used in various applications such as robot vision, industrial inspection and medical imaging, thanks to their improved resolution and portability. However, the performance of traditional computer vision techniques developed for electro-optical imagery does not directly translate to the thermal domain due to two major reasons: these algorithms require photometric assumptions to hold, and methods for photometric calibration of RGB cameras cannot be applied to thermal-infrared cameras due to difference in data acquisition and sensor phenomenology. In this paper, we take a step in this direction, and introduce a novel algorithm for online photometric calibration of thermal-infrared cameras. Our proposed method does not require any specific driver/hardware support and hence can be applied to any commercial off-the-shelf thermal IR camera. We present this in the context of visual odometry and SLAM algorithms, and demonstrate the efficacy of our proposed system through extensive experiments for both standard benchmark datasets, and real-world field tests with a thermal-infrared camera in natural outdoor environments.
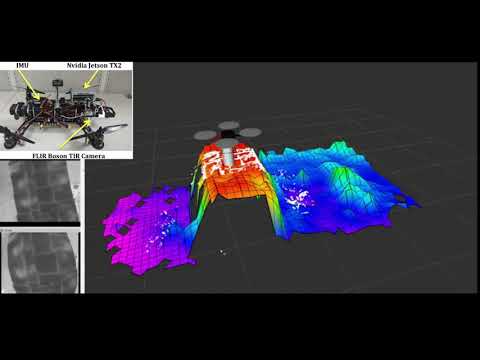
Check out our YouTube-Video, showing Online Thermal Photometric Calibration in Action
The following instructions will help you run the photometric calibration on our dataset.
- The file
main.cppdoes two things: 1) parses our dataset, and 2) calls theirPhotoCalibmethods to perform the calibration. After calibration it will show two videos side-by-side. Left: Input video, Right: Calibrated video. - If you want to use the calibration method for your own dataset, you might want to modify the
main.cppaccording to your method of computing pixel correspondences. - The method
ProcessCurrentFrameis function that needs to be called per-frame for both online and offline operation. It primarily requires correspondences between the frame being processed and past frames. The past frames can be any frame in the past as long as there are atleast 4 correspondences, and there can be multiple past frames. main.cppprovides a simple guide on how to perform the calibration.
Dataset: Please download the AM09_LWIR_V000 dataset used in the paper from this link.
$ git clone https://github.com/mpdmanash/thermal_photometric_calibration.git
$ cd thermal_photometric_calibration
$ mkdir -p build && cd build
$ cmake ..
$ make
$ cd thermal_photometric_calibration/build
$ OMP_NUM_THREADS=4 ./main <path to the downloaded video file> <path to the correspondence file>
- Implement Gaussian Process for Spatial Parameters
- Implement OpenMP to parallely process each history frame
- Add assertions to check user input and prevent bad memory access
If you use this code in an academic context, please cite the following RAL-ICRA 2021 paper. Manash Pratim Das, Larry Matthies, Shreyansh Daftry: Online Photometric Calibration of Automatic Gain Thermal Infrared Cameras, IEEE Robotics and Automation Letters 6.2 (2021): 2453-2460.
@ARTICLE{9361124,
author={Das, Manash Pratim and Matthies, Larry and Daftry, Shreyansh},
journal={IEEE Robotics and Automation Letters},
title={Online Photometric Calibration of Automatic Gain Thermal Infrared Cameras},
year={2021},
volume={6},
number={2},
pages={2453-2460},
doi={10.1109/LRA.2021.3061401}}
Dependencies: OpenCV (3.4.9), Ceres-Solver (1.13.0), Eigen (3.3.7) OpenMP, Boost Libraries
Contact: Manash Pratim Das (mpdmanash @ cmu . edu)