This is a gazebo simulation of the Parrot Jumping Sumo. It also includes ROS wrapper (from https://github.com/arnaud-ramey/rossumo ) for Ardrone SDK 3 modified to behave like the Gazebo Sumo. With both of these you can both simulate a Jumping Sumo Drone and run a real Sumo Drone through ROS. You can do things like record movements on the real Sumo drone with ROSBAG and then play them in the simulation. You can see an example of this in the video. The ultimate goal of creating this simulation is to use reinforcement learning to teach a sumo to do tasks like climb stairs in Gazebo and then apply what was learnt to a real jumping sumo such as climbing stairs. It will be similar to https://github.com/erlerobot/gym-gazebo but with a sumo instead of a turtlebot.
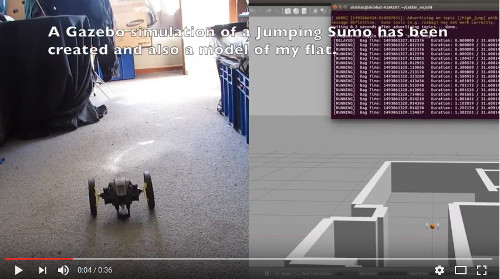
This video shows is an example of a movements of a real Sumo recorded with ROSBAG on the left and the movements being played to the simulation in Gazebo. The layout of the real room and the Gazebo room is the same:
Install ROS (eg http://wiki.ros.org/indigo/Installation/Ubuntu if from ubuntu)
If you just want use the sumo model under gazebo then under your catkin_ws directory:
cd ~/catkin_ws/src
git clone https://github.com/forthtemple/rossumo-gazebo.git
cd ~/catkin_ws
catkin_make --only-pkg-with-deps rossumo_gazebo
catkin_make --only-pkg-with-deps rossumo_description
In one terminal run:
roslaunch rossumo_gazebo rossumo_world.launch
In another terminal run:
rosrun rossumo_gazebo teleop_twist_keyboard.py
and press the keys to move the sumo.
If you want to jump in the simulation then run:
rosrun rossumo_gazebo rossumo.py
To install the ROS wrapper for Ardrone SDK 3 follow instructions for install rossumo under 'rossumo' directory including building the ardrone SDK. It is a copy of https://github.com/arnaud-ramey/rossumo but has been modified to behave like the Gazebo sumo.
To record a real sumo
rosbag record rossumo1/cmd_vel /rossumo1/high_jump
To play it to your Gazebo sumo replace xx-xxx-xx with your recorded bag file name
rosbag play xx-xxx-xx.bag /rossumo1/cmd_vel:=/cmd_vel /rossumo1/high_jump:=/high_jump