This repo will not be updated since the vector extension part is quite long(riscv_inst_vext_total.sail). We are trying to slice this part into several shorter versions. Here is our new repo: https://github.com/XinlaiWan/sail-riscv.git
This repository contains a formal specification of the RISC-V architecture, written in Sail (repo). It has been adopted by the RISC-V Foundation. As of 2021-08-24, the repo has been moved from https://github.com/rems-project/sail-riscv to https://github.com/riscv/sail-riscv.
The model specifies assembly language formats of the instructions, the corresponding encoders and decoders, and the instruction semantics. The current status of its coverage of the prose RISC-V specification is summarized here. A reading guide to the model is provided in the doc/ subdirectory, along with a guide on how to extend the model.
Latex definitions can be generated from the model that are suitable for inclusion in reference documentation. Drafts of the RISC-V unprivileged and privileged specifications that include the Sail formal definitions are available in the sail branch of this risc-v-isa-manual repository. The process to perform this inclusion is explained here.
This is one of several formal models that were compared within the RISC-V ISA Formal Spec Public Review.
Sail (repo) is a language for describing the instruction-set architecture (ISA) semantics of processors. Sail aims to provide a engineer-friendly, vendor-pseudocode-like language for describing instruction semantics. It is essentially a first-order imperative language, but with lightweight dependent typing for numeric types and bitvector lengths, which are automatically checked using Z3.
Given a Sail definition, the tool will type-check it and generate LaTeX snippets to use in documentation, executable emulators (in C and OCaml), theorem-prover definitions for Isabelle, HOL4, and Coq, and definitions to integrate with our RMEM and isla-axiomatic tools for concurrency semantics.
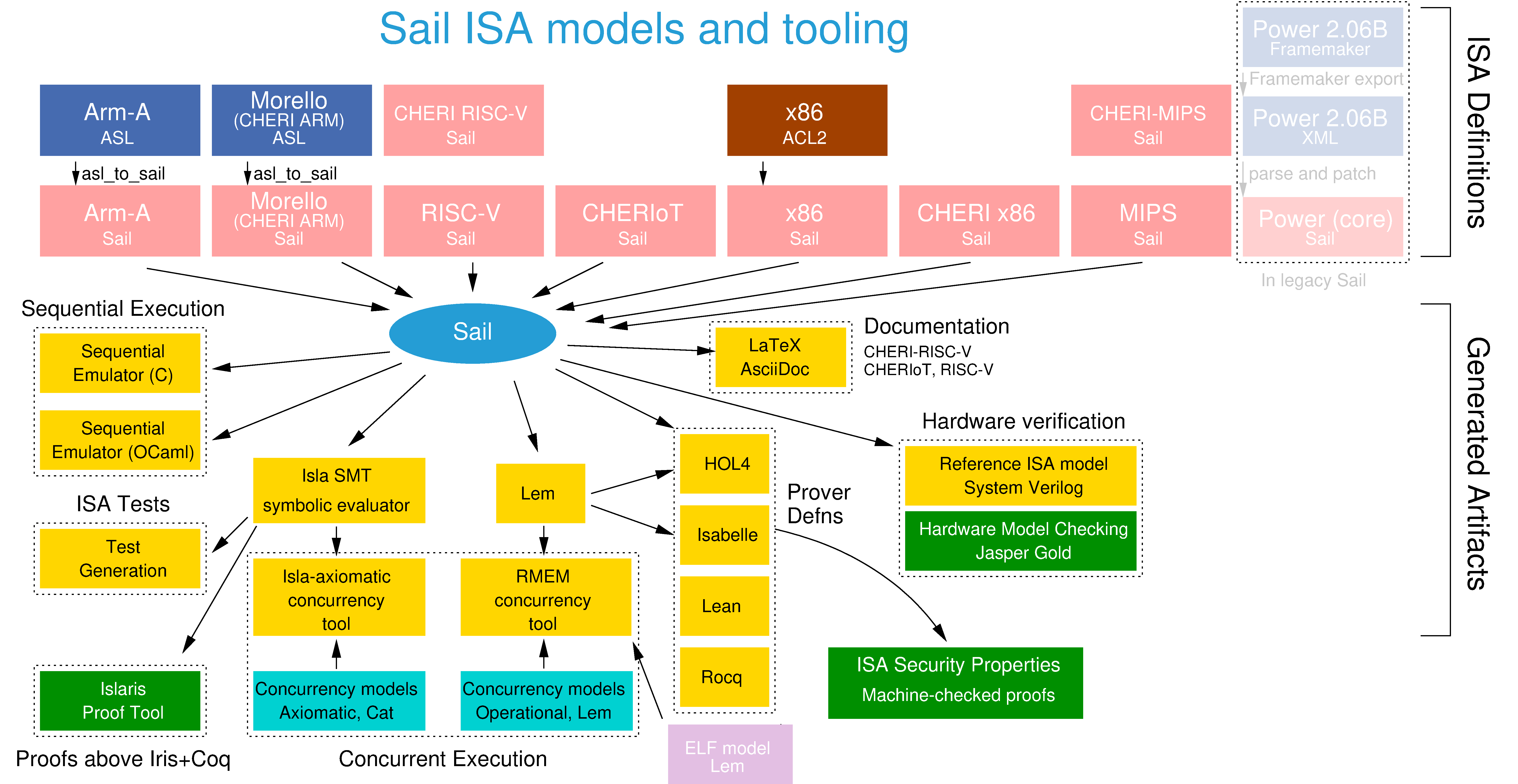
Sail is being used for multiple ISA descriptions, including essentially complete versions of the sequential behaviour of Armv8-A (automatically derived from the authoritative Arm-internal specification, and released under a BSD Clear licence with Arm's permission), RISC-V, MIPS, CHERI-RISC-V, and CHERI-MIPS; all these are complete enough to boot various operating systems. There are also Sail models for smaller fragments of IBM POWER and x86.
These are verbatim excerpts from the model file containing the base instructions, riscv_insts_base.sail, with a few comments added.
/* the assembly abstract syntax tree (AST) clause for the ITYPE instructions */
union clause ast = ITYPE : (bits(12), regbits, regbits, iop)
/* the encode/decode mapping between AST elements and 32-bit words */
mapping encdec_iop : iop <-> bits(3) = {
RISCV_ADDI <-> 0b000,
RISCV_SLTI <-> 0b010,
RISCV_SLTIU <-> 0b011,
RISCV_ANDI <-> 0b111,
RISCV_ORI <-> 0b110,
RISCV_XORI <-> 0b100
}
mapping clause encdec = ITYPE(imm, rs1, rd, op) <-> imm @ rs1 @ encdec_iop(op) @ rd @ 0b0010011
/* the execution semantics for the ITYPE instructions */
function clause execute (ITYPE (imm, rs1, rd, op)) = {
let rs1_val = X(rs1);
let immext : xlenbits = EXTS(imm);
let result : xlenbits = match op {
RISCV_ADDI => rs1_val + immext,
RISCV_SLTI => EXTZ(rs1_val <_s immext),
RISCV_SLTIU => EXTZ(rs1_val <_u immext),
RISCV_ANDI => rs1_val & immext,
RISCV_ORI => rs1_val | immext,
RISCV_XORI => rs1_val ^ immext
};
X(rd) = result;
true
}
/* the assembly/disassembly mapping between AST elements and strings */
mapping itype_mnemonic : iop <-> string = {
RISCV_ADDI <-> "addi",
RISCV_SLTI <-> "slti",
RISCV_SLTIU <-> "sltiu",
RISCV_XORI <-> "xori",
RISCV_ORI <-> "ori",
RISCV_ANDI <-> "andi"
}
mapping clause assembly = ITYPE(imm, rs1, rd, op)
<-> itype_mnemonic(op) ^ spc() ^ reg_name(rd) ^ sep() ^ reg_name(rs1) ^ sep() ^ hex_bits_12(imm)
union clause ast = SRET : unit
mapping clause encdec = SRET() <-> 0b0001000 @ 0b00010 @ 0b00000 @ 0b000 @ 0b00000 @ 0b1110011
function clause execute SRET() = {
match cur_privilege {
User => handle_illegal(),
Supervisor => if mstatus.TSR() == true
then handle_illegal()
else nextPC = handle_exception(cur_privilege, CTL_SRET(), PC),
Machine => nextPC = handle_exception(cur_privilege, CTL_SRET(), PC)
};
false
}
mapping clause assembly = SRET() <-> "sret"
The model builds OCaml and C emulators that can execute RISC-V ELF files, and both emulators provide platform support sufficient to boot Linux, FreeBSD and seL4. The OCaml emulator can generate its own platform device-tree description, while the C emulator currently requires a consistent description to be manually provided. The C emulator can be linked against the Spike emulator for execution with per-instruction tandem-verification.
The C emulator, for the Linux boot, currently runs at approximately 300 KIPS on an Intel i7-7700 (when detailed per-instruction tracing is disabled), and there are many opportunities for future optimisation (the Sail MIPS model runs at approximately 1 MIPS). This enables one to boot Linux in about 4 minutes, and FreeBSD in about 2 minutes. Memory usage for the C emulator when booting Linux is approximately 140MB.
The files in the OCaml and C emulator directories implement ELF loading and the platform devices, define the physical memory map, and use command-line options to select implementation-specific ISA choices.
The Sail-generated C emulator can measure specification branch coverage of any executed tests, displaying the results as per-file tables and as html-annotated versions of the model source.
For tandem verification of random instruction streams, the tools support the protocols used in TestRIG to directly inject instructions into the C emulator and produce trace information in RVFI format. This has been used for cross testing against spike and the RVBS specification written in Bluespec SystemVerilog.
The C emulator can also be directly linked to Spike, which provides tandem-verification on ELF binaries (including OS boots). This is often useful in debugging OS boot issues in the model when the boot is known working on Spike. It is also useful to detect platform-specific implementation choices in Spike that are not mandated by the ISA specification.
The ISA model is integrated with the operational model of the RISC-V relaxed memory model, RVWMO (as described in an appendix of the RISC-V user-level specification), which is one of the reference models used in the development of the RISC-V concurrency architecture; this is part of the RMEM tool. It is also integrated with the RISC-V axiomatic concurrency model as part of the isla-axiomatic tool.
As part of the University of Cambridge/ INRIA concurrency architecture work, those groups produced and released a library of approximately 7000 litmus tests. The operational and axiomatic RISC-V concurrency models are in sync for these tests, and they moreover agree with the corresponding ARM architected behaviour for the tests in common.
Those tests have also been run on RISC-V hardware, on a SiFive RISC-V FU540 multicore proto board (Freedom Unleashed), kindly on loan from Imperas. To date, only sequentially consistent behaviour was observed there.
The Sail OCaml backend can produce QuickCheck-style random generators for types in Sail specifications, which have been used to produce random instructions sequences for testing. The generation of individual types can be overridden by the developer to, for example, remove implementation-specific instructions or introduce register biasing.
Sail aims to support the generation of idiomatic theorem prover
definitions across multiple tools. At present it supports Isabelle,
HOL4 and Coq, and the prover_snapshots directory provides snapshots of the generated theorem prover
definitions.
These theorem-prover translations can target multiple monads for different purposes. The first is a state monad with nondeterminism and exceptions, suitable for reasoning in a sequential setting, assuming that effectful expressions are executed without interruptions and with exclusive access to the state.
For reasoning about concurrency, where instructions execute out-of-order, speculatively, and non-atomically, there is a free monad over an effect datatype of memory actions. This monad is also used as part of the aforementioned concurrency support via the RMEM tool.
The files under handwritten_support provide library definitions for
Coq, Isabelle and HOL4.
sail-riscv
- model // Sail specification modules
- generated_definitions // files generated by Sail, in RV32 and RV64 subdirectories
- c
- ocaml
- lem
- isabelle
- coq
- hol4
- latex
- prover_snapshots // snapshots of generated theorem prover definitions
- handwritten_support // prover support files
- c_emulator // supporting platform files for C emulator
- ocaml_emulator // supporting platform files for OCaml emulator
- doc // documentation, including a reading guide
- test // test files
- riscv-tests // snapshot of tests from the riscv/riscv-tests github repo
- os-boot // information and sample files for booting OS images
Install Sail using opam then:
$ make
will build the 64-bit OCaml simulator in
ocaml_emulator/riscv_ocaml_sim_RV64, the C simulator in
c_emulator/riscv_sim_RV64, the Isabelle model in
generated_definitions/isabelle/RV64/Riscv.thy, the Coq model in
generated_definitions/coq/RV64/riscv.v, and the HOL4 model in
generated_definitions/hol4/RV64/riscvScript.sml.
One can build either the RV32 or the RV64 model by specifying
ARCH=RV32 or ARCH=RV64 on the make line, and using the matching
target suffix. RV64 is built by default, but the RV32 model can be
built using:
$ ARCH=RV32 make
which creates the 32-bit OCaml simulator in
ocaml_emulator/riscv_ocaml_sim_RV32, and the C simulator in
c_emulator/riscv_sim_RV32, and the prover models in the
corresponding RV32 subdirectories.
The Makefile targets riscv_isa_build, riscv_coq_build, and
riscv_hol_build invoke the respective prover to process the
definitions. We have tested Isabelle 2018, Coq 8.8.1, and HOL4
Kananaskis-12. When building these targets, please make sure the
corresponding prover libraries in the Sail directory
($SAIL_DIR/lib/$prover) are up-to-date and built, e.g. by running
make in those directories.
The C and OCaml simulators can be used to execute small test binaries. The OCaml simulator depends on the Device Tree Compiler package, which can be installed in Ubuntu with:
$ sudo apt-get install device-tree-compiler
Then, you can run test binaries:
$ ./ocaml_emulator/riscv_ocaml_sim_<arch> <elf-file>
$ ./c_emulator/riscv_sim_<arch> <elf-file>
A suite of RV32 and RV64 test programs derived from the
riscv-tests test-suite is
included under test/riscv-tests/. The test-suite
can be run using test/run_tests.sh.
Some information on additional configuration options for each
simulator is available from ./ocaml_emulator/riscv_ocaml_sim_<arch> -h and ./c_emulator/riscv_sim_<arch> -h.
Some useful options are: configuring whether misaligned accesses trap
(--enable-misaligned for C and -enable-misaligned for OCaml), and
whether page-table walks update PTE bits (--enable-dirty-update for C
and -enable-dirty-update for OCaml).
There is also (as yet unmerged) support for integration with riscv-config to allow configuring the compiled model according to a riscv-config yaml specification.
For booting operating system images, see the information under the os-boot/ subdirectory.
Rarely, the version of Sail packaged in opam may not meet your needs. This could happen if you need a bug fix or new feature not yet in the released Sail version, or you are actively working on Sail. In this case you can tell the sail-riscv Makefile to use a local copy of Sail by setting SAIL_DIR to the root of a checkout of the Sail repo when you invoke make. Alternatively, you can use opam pin to install Sail from a local checkout of the Sail repo as described in the Sail installation instructions.
The model is made available under the BSD two-clause licence in LICENCE.
Prashanth Mundkur, SRI International; Rishiyur S. Nikhil (Bluespec Inc.); Jon French, University of Cambridge; Brian Campbell, University of Edinburgh; Robert Norton-Wright, University of Cambridge and Microsoft; Alasdair Armstrong, University of Cambridge; Thomas Bauereiss, University of Cambridge; Shaked Flur, University of Cambridge; Christopher Pulte, University of Cambridge; Peter Sewell, University of Cambridge; Alexander Richardson, University of Cambridge; Hesham Almatary, University of Cambridge; Jessica Clarke, University of Cambridge; Nathaniel Wesley Filardo, Microsoft; Peter Rugg, University of Cambridge; Scott Johnson, Aril Computer Corp.
This software was developed by the above within the Rigorous Engineering of Mainstream Systems (REMS) project, partly funded by EPSRC grant EP/K008528/1, at the Universities of Cambridge and Edinburgh.
This software was developed by SRI International and the University of Cambridge Computer Laboratory (Department of Computer Science and Technology) under DARPA/AFRL contract FA8650-18-C-7809 ("CIFV"), and under DARPA contract HR0011-18-C-0016 ("ECATS") as part of the DARPA SSITH research programme.
This project has received funding from the European Research Council (ERC) under the European Union’s Horizon 2020 research and innovation programme (grant agreement 789108, ELVER).