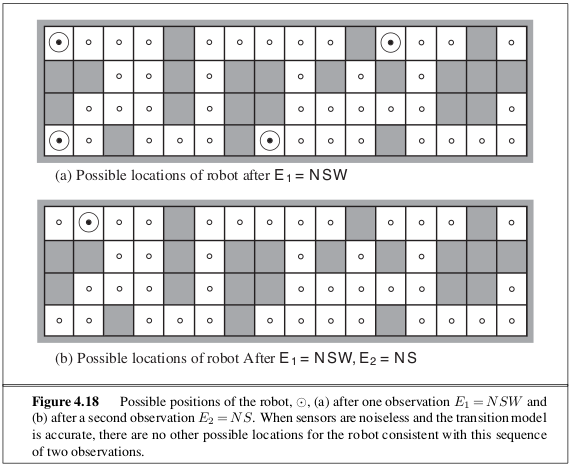
Consider the vacuum worlds of
Figure vacuum-maze-ch4-figure (perfect sensing) and
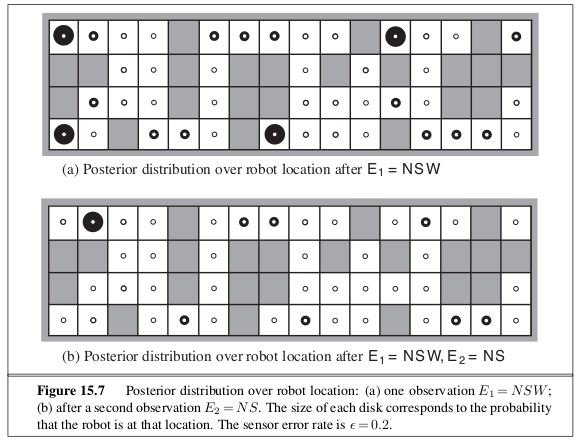
Figure vacuum-maze-hmm2-figure (noisy sensing). Suppose
that the robot receives an observation sequence such that, with perfect
sensing, there is exactly one possible location it could be in. Is this
location necessarily the most probable location under noisy sensing for
sufficiently small noise probability
{kind=link}
{kind=link}