diff --git a/docs/Edge/Raspberry_Pi_Devices/reTerminal-DM/SCADA/reTerminal-DM_intro_FUXA.md b/docs/Edge/Raspberry_Pi_Devices/reTerminal-DM/SCADA/reTerminal-DM_intro_FUXA.md
index 1188abf82fbe..a07dac5cf641 100644
--- a/docs/Edge/Raspberry_Pi_Devices/reTerminal-DM/SCADA/reTerminal-DM_intro_FUXA.md
+++ b/docs/Edge/Raspberry_Pi_Devices/reTerminal-DM/SCADA/reTerminal-DM_intro_FUXA.md
@@ -15,6 +15,8 @@ last_update:
## What is SCADA?
+ +
**Supervisory Control and Data Acquisition (SCADA)** is a critical system in industrial settings designed to monitor and control processes. It serves as a **centralized platform that gathers real-time data from various sensors and devices across the industrial network**. SCADA enables operators to **visualize, analyze, and respond to this data, facilitating efficient decision-making**. Additionally, it provides **remote access and control capabilities, allowing operators to manage processes from a central location**. The integration of SCADA enhances the overall efficiency, safety, and reliability of industrial operations by providing a comprehensive overview and control of the entire system.
+
**Supervisory Control and Data Acquisition (SCADA)** is a critical system in industrial settings designed to monitor and control processes. It serves as a **centralized platform that gathers real-time data from various sensors and devices across the industrial network**. SCADA enables operators to **visualize, analyze, and respond to this data, facilitating efficient decision-making**. Additionally, it provides **remote access and control capabilities, allowing operators to manage processes from a central location**. The integration of SCADA enhances the overall efficiency, safety, and reliability of industrial operations by providing a comprehensive overview and control of the entire system.
 diff --git a/docs/Edge/Raspberry_Pi_Devices/reTerminal/Application/Managed_Services/neqto_engine_for_linux_reTerminal.md b/docs/Edge/Raspberry_Pi_Devices/reTerminal/Application/Managed_Services/neqto_engine_for_linux_reTerminal.md
new file mode 100644
index 000000000000..d504cb79e0f1
--- /dev/null
+++ b/docs/Edge/Raspberry_Pi_Devices/reTerminal/Application/Managed_Services/neqto_engine_for_linux_reTerminal.md
@@ -0,0 +1,235 @@
+---
+description: Getting started of NEQTO Engine for Linux on reTerminal
+title: Getting started of NEQTO Engine for Linux on reTermianl
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /neqto_engine_for_linux_reTerminal
+last_update:
+ date: 04/17/2024
+ author: Kazuhiro Ozuchi
+---
+
+## Introduction
+
+NEQTO is a lightweight and secure software package allowing companies to remotely install and configure their software on edge devices. NEQTO enables companies to provide improved software services to end users through turnkey platform connectors and built-in software lifecycle management.
+
+Devices installed with NEQTO can be managed through API or the ready-to-use NEQTO Console, which includes optional services for data storage, alerts, and watchdog monitoring. Businesses can enable AIoT with near-instant installation on any Linux device and seamless data integration with any on-premise or cloud servers.
+
+
diff --git a/docs/Edge/Raspberry_Pi_Devices/reTerminal/Application/Managed_Services/neqto_engine_for_linux_reTerminal.md b/docs/Edge/Raspberry_Pi_Devices/reTerminal/Application/Managed_Services/neqto_engine_for_linux_reTerminal.md
new file mode 100644
index 000000000000..d504cb79e0f1
--- /dev/null
+++ b/docs/Edge/Raspberry_Pi_Devices/reTerminal/Application/Managed_Services/neqto_engine_for_linux_reTerminal.md
@@ -0,0 +1,235 @@
+---
+description: Getting started of NEQTO Engine for Linux on reTerminal
+title: Getting started of NEQTO Engine for Linux on reTermianl
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /neqto_engine_for_linux_reTerminal
+last_update:
+ date: 04/17/2024
+ author: Kazuhiro Ozuchi
+---
+
+## Introduction
+
+NEQTO is a lightweight and secure software package allowing companies to remotely install and configure their software on edge devices. NEQTO enables companies to provide improved software services to end users through turnkey platform connectors and built-in software lifecycle management.
+
+Devices installed with NEQTO can be managed through API or the ready-to-use NEQTO Console, which includes optional services for data storage, alerts, and watchdog monitoring. Businesses can enable AIoT with near-instant installation on any Linux device and seamless data integration with any on-premise or cloud servers.
+
+
+
+## Prerequisites
+
+### Hardware supported
+
+
+
+
+ | reTerminal |
+
+ |
+
+ |
+
+ |
+
+ |
+
+
+

+
+in NEQTO Console
+
+
+
+2. Click `CREATE API KEY`
+
+
+
+And then the API Key will be displayed
+
+
+
+
+3. Download `NEQTO Engine Linux Installer` by curl or wget.
+
+ This time, use the wget command.
+
+
+
+Copy the `Download link` of `Installer of NEQTO Engine for Linux` and paste it after "wget ".
+
+
+
+Installer downloads successfully
+
+
+
+4. Change the execution permissions of the downloaded installer (`neqto-daemon-install.latest.sh`) with the chmod command before running the installation of NEQTO Engine for Linux.
+
+
+
+
+
+
+5. Copy the `API Key` from `API Keys for NEQTO Engine for Linux` in the NEQTO Console and paste it after `sudo ./neqto-daemon-install.latest.sh -k `.
+
+
+
+
+6. Just after execution, important notes will be displayed. Please check it and enter "agree" if you agree. Thereafter, device registration will be executed, and software installation will continue.
+
+
+
+
+
+7. Please wait until the final status `Installation completed successfully!` is displayed.
+
+
+
+Confirmation that the device has been registered on the NEQTO Console
+
+
+
+
+
+### Hello World
+
+1. Click on `ADD GROUP` under `GROUPS`.
+
+
+
+2. Enter `reTerminal` in `Name` and click `SAVE`
+
+
+
+
+
+
+
+3. Select the `reTerminal` you created and click `SCRIPTS`
+
+
+
+4. Click `ADD SCRIPT`
+
+
+
+5. Enter `Hello World` in the `Name` field and click `SAVE`
+
+
+
+6. Copy and paste the [sample code](https://docs.neqto.com/docs/en/getting-started/tutorial-step1#sample-code) from `Getting Started` into the NEQTO Console script editor and then click `Save`.
+
+
+
+
+
+7. Click on `TEMPLATES`
+
+
+
+And then click on `ADD TEMPLATE`
+
+
+
+8. Set `DEVICE INFORMATION` as follows
+
+ - Enter `reTerminal Template` for `Name` field
+
+ - Select `Linux-based device` for `Firmware Type` field
+
+ - Select the latest version for `Firmware Version` field
+
+
+
+
+
+9. For `OPTIONS`, select `Hello World` in `Script` field and click `SAVE`
+
+
+
+10. Click on `NODES`
+
+
+
+And then click on `ADD NODE`
+
+
+
+
+
+11. Set `META DATA` as follows
+
+ - Set `Name` field to `reTerminal`
+
+ - Set `Template` field to `reTerminal Template`
+
+
+
+12. Select the device you just registered in `DEVICE INFORMATION` and click `SAVE`
+
+
+
+
+
+13. Type `tail -F /tmp/neqto/log/neqto.log` on the terminal on reTerminal
+
+
+
+
+
+14. After running `Reload Script` on NEQTO Console, you can see `Hello World!!!` on the terminal of reTerminal
+
+
+
+
+
+## What's More / Trouble Shooting
+
+- [NEQTO Support](https://support.neqto.com/hc/en-us)
+- [Support Guidelines](https://docs.neqto.com/docs/en/neqto/support-guidelines)
+
+## Resource
+
+- [NEQTO Resource Center](https://docs.neqto.com/docs/en/linux/software/requirements)
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
+
diff --git a/docs/Seeed_Elderly/weekly_wiki/wiki240408.md b/docs/Seeed_Elderly/weekly_wiki/wiki240408.md
new file mode 100644
index 000000000000..f254fdc7aee2
--- /dev/null
+++ b/docs/Seeed_Elderly/weekly_wiki/wiki240408.md
@@ -0,0 +1,126 @@
+---
+description: Weekly Wiki
+title: Weekly Wiki✨
+keywords:
+- weeely wiki
+image: https://files.seeedstudio.com/wiki/IndexWiki/logo_image.jpg
+last_update:
+ date: 04/08/2024
+ author: Seraphina
+---
+
+
+
+## Greetings
+
+This is Seraphina in Seeed Studio and welcome to the Seeed Studio weekly wiki! Each Monday, I will introduce you our latest wiki, including the ones related to our new products, the interesting projects published by Seeed Studio, and the tutorials, introductions, etc... You name it.
+
+✨ For each week, when a collaborator contributes a project or fixes something important, we put the stars at the end of title of "Weekly Wiki" for more people be able to see their efforts👍.
+
+Today is April 8th and a brand new week has begun! Check out what Seeed Studio did last week!
+
+## Latest Wiki Launched
+
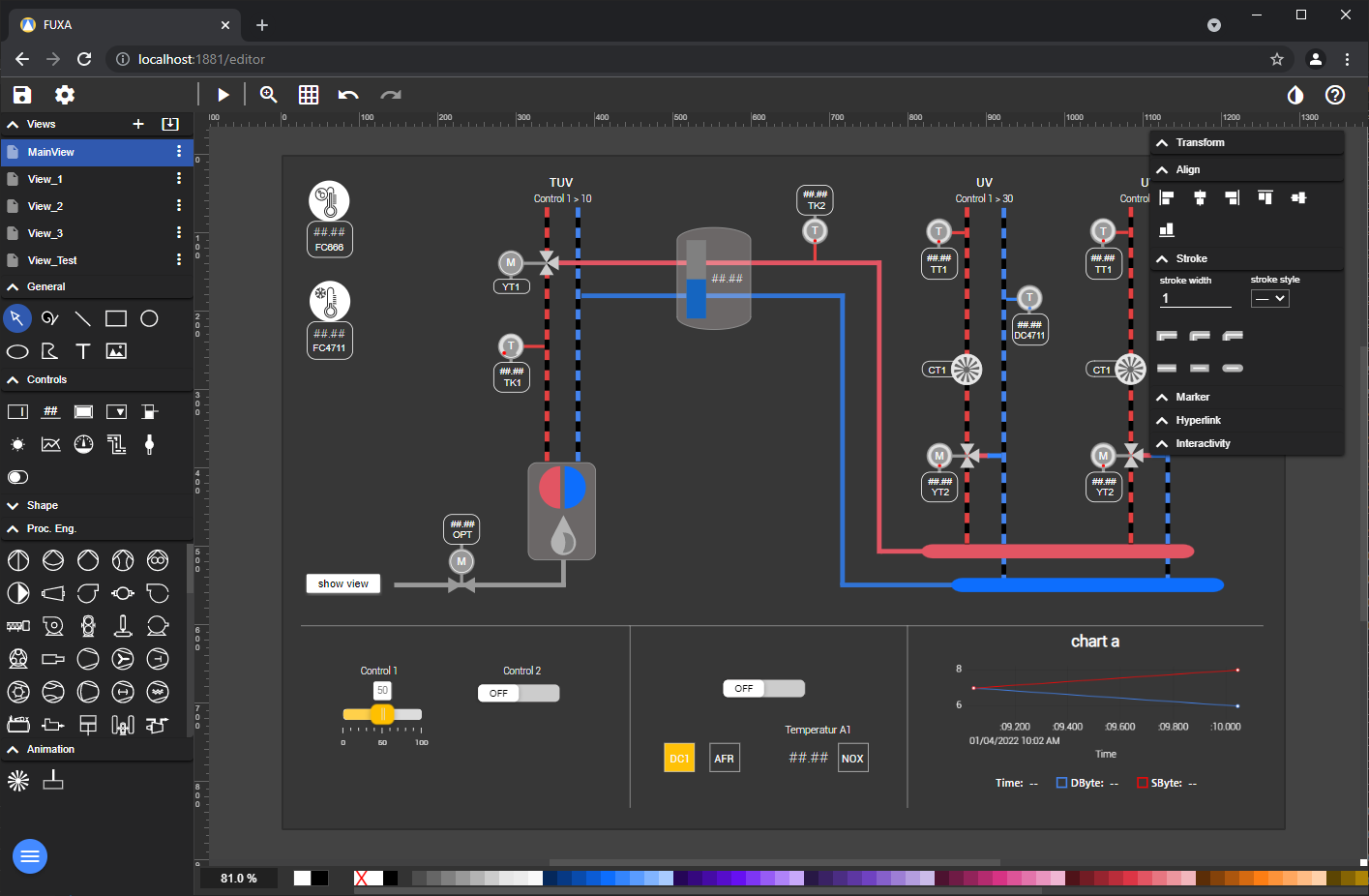
+### [Intergating Historian Module for Visualizing on reTerminal DM](https://wiki.seeedstudio.com/reTerminalDM_N3uron_Historian/)
+
+Introducing [N3uron](https://n3uron.com/) Historian: a powerful time-series storage system built on MongoDB. Easily configure it to store data from MongoDB in x64 bit, x32 bit and ARM architectures. With Neuron Historian, you can store tag values collected locally or remotely via N3uron Links. Plus, it offers a handy Store & Forward feature for data retention during communication loss. Thanks to efficient compression and partitioning, it handles massive data volumes without performance loss. For reference, 1GB of storage can hold around 100 million events.
+
+ +
+### Getting start with reComputer series
+
+We have added the Getting start Pages for reComputer series. Here are the links:
+
+[Getting start with reComputer J1010](https://wiki.seeedstudio.com/reComputer_J1010_with_Jetson_getting_start)
+
+[Getting start with reComputer J1020V2](https://wiki.seeedstudio.com/reComputer_J1020v2_with_Jetson_getting_start)
+
+[Getting start with reComputer J30/40](https://wiki.seeedstudio.com/reComputer_J30_40_with_Jetson_getting_start)
+
+## Existed Wiki Updated
+
+### [Grove - EMG Detector](https://wiki.seeedstudio.com/Grove-EMG_Detector/)
+
+We have added a Tips for the part list of Grove - EMG Detector
+
+The part list of this product has been updated recently. You may receive connecting wires of two specifications, their functions are completely identical, only the colors are different,the corresponding relationship is shown in the diagram below.
+
+
+
+
+
+## Past Weekly wiki
+
+- [weekly wiki on 2.27th](/Seeed_Elderly/weekly_wiki/wiki227)
+- [weekly wiki on 3.06th](/Seeed_Elderly/weekly_wiki/wiki306)
+- [weekly wiki on 3.13th](/Seeed_Elderly/weekly_wiki/wiki313)
+- [weekly wiki on 3.20th](/Seeed_Elderly/weekly_wiki/wiki320)
+- [weekly wiki on 3.27th](/Seeed_Elderly/weekly_wiki/wiki327)
+- [weekly wiki on 4.03rd](/Seeed_Elderly/weekly_wiki/wiki403)
+- [weekly wiki on 4.10th](/Seeed_Elderly/weekly_wiki/wiki410)
+- [weekly wiki on 4.17th](/Seeed_Elderly/weekly_wiki/wiki417)
+- [weekly wiki on 4.24th](/Seeed_Elderly/weekly_wiki/wiki424)
+- [weekly wiki on 5.15th](/Seeed_Elderly/weekly_wiki/wiki515)
+- [weekly wiki on 5.22nd](/Seeed_Elderly/weekly_wiki/wiki522)
+- [weekly wiki on 5.29th](/Seeed_Elderly/weekly_wiki/wiki529)
+- [weekly wiki on 6.05th](/Seeed_Elderly/weekly_wiki/wiki605)
+- [weekly wiki on 6.12th](/Seeed_Elderly/weekly_wiki/wiki612)
+- [weekly wiki on 6.19th](/Seeed_Elderly/weekly_wiki/wiki619)
+- [weekly wiki on 7.03th](/Seeed_Elderly/weekly_wiki/wiki703)
+- [weekly wiki on 7.10th](/Seeed_Elderly/weekly_wiki/wiki710)
+- [weekly wiki on 7.17th](/Seeed_Elderly/weekly_wiki/wiki717)
+- [weekly wiki on 7.24th](/Seeed_Elderly/weekly_wiki/wiki724)
+- [weekly wiki on 7.31th](/Seeed_Elderly/weekly_wiki/wiki731)
+- [weekly wiki on 8.07th](/Seeed_Elderly/weekly_wiki/wiki807)
+- [weekly wiki on 8.21st](/Seeed_Elderly/weekly_wiki/wiki821)
+- [weekly wiki on 8.28th](/Seeed_Elderly/weekly_wiki/wiki828)
+- [weekly wiki on 9.11st](/Seeed_Elderly/weekly_wiki/wiki911)
+- [weekly wiki on 9.18th](/Seeed_Elderly/weekly_wiki/wiki918)
+- [weekly wiki on 9.25th](/Seeed_Elderly/weekly_wiki/wiki925)
+- [weekly wiki on 10.9th](/Seeed_Elderly/weekly_wiki/wiki1009)
+- [weekly wiki on 10.16th](/Seeed_Elderly/weekly_wiki/wiki1016)
+- [weekly wiki on 10.23th](/Seeed_Elderly/weekly_wiki/wiki1023)
+- [weekly wiki on 10.30th](/Seeed_Elderly/weekly_wiki/wiki1030)
+- [weekly wiki on 11.06th](/Seeed_Elderly/weekly_wiki/wiki1106)
+- [weekly wiki on 11.13th](/Seeed_Elderly/weekly_wiki/wiki1113)
+- [weekly wiki on 11.20th](/Seeed_Elderly/weekly_wiki/wiki1120)
+- [weekly wiki on 11.27th](/Seeed_Elderly/weekly_wiki/wiki1127)
+- [weekly wiki on 12.04th](/Seeed_Elderly/weekly_wiki/wiki1204)
+- [weekly wiki on 12.11th](/Seeed_Elderly/weekly_wiki/wiki1211)
+- [weekly wiki on 12.18th](/Seeed_Elderly/weekly_wiki/wiki1218)
+- [weekly wiki on 12.25th](/Seeed_Elderly/weekly_wiki/wiki1225)
+- [weekly wiki on 2024.1.08th](/Seeed_Elderly/weekly_wiki/wiki240108)
+- [weekly wiki on 2024.1.15th](/Seeed_Elderly/weekly_wiki/wiki240115)
+- [weekly wiki on 2024.1.22nd](/Seeed_Elderly/weekly_wiki/wiki240122)
+- [weekly wiki on 2024.1.29th](/Seeed_Elderly/weekly_wiki/wiki240129)
+- [weekly wiki on 2024.2.19th](/Seeed_Elderly/weekly_wiki/wiki240219)
+- [weekly wiki on 2024.2.26th](/Seeed_Elderly/weekly_wiki/wiki240226)
+- [weekly wiki on 2024.3.04th](/Seeed_Elderly/weekly_wiki/wiki240304)
+- [weekly wiki on 2024.3.11th](/Seeed_Elderly/weekly_wiki/wiki240311)
+- [weekly wiki on 2024.3.18th](/Seeed_Elderly/weekly_wiki/wiki240318)
+- [weekly wiki on 2024.3.25th](/Seeed_Elderly/weekly_wiki/wiki240325)
+- [weekly wiki on 2024.4.01st](/Seeed_Elderly/weekly_wiki/wiki240401)
diff --git a/docs/Sensor/Grove/Grove_Sensors/AI-powered/Grove-vision-ai-v2/Grove-vision-ai-v2-camera-supported.md b/docs/Sensor/Grove/Grove_Sensors/AI-powered/Grove-vision-ai-v2/Grove-vision-ai-v2-camera-supported.md
index 1114bdf75074..d44c754a4471 100644
--- a/docs/Sensor/Grove/Grove_Sensors/AI-powered/Grove-vision-ai-v2/Grove-vision-ai-v2-camera-supported.md
+++ b/docs/Sensor/Grove/Grove_Sensors/AI-powered/Grove-vision-ai-v2/Grove-vision-ai-v2-camera-supported.md
@@ -36,6 +36,10 @@ The other CSI cameras are theoretically supported, but due to the fact that some
- [IMX390 2.12MP 118°(H) FOV 4-lane MIPI CSI Camera](https://www.seeedstudio.com/IMX390-2-12MP-118-H-FOV-4-lane-MIPI-CSI-Camera-p-5708.html)
- [IMX219 M12/CS mount CMOS Camera Module](https://www.seeedstudio.com/IMX-219-CMOS-camera-module-M12-and-CS-camera-available-p-5372.html)
+
+Grove Vision AI V2 now supports Raspberry Pi cameras for users who purchase after February 21, 2024. However, users who purchased before this date currently do not have support for these specific camera models that work with image input. The team is actively working on a solution to extend this functionality to early purchasers as well.
+
+
## Resources
diff --git a/docs/Sensor/Grove/Grove_Sensors/AI-powered/Grove-vision-ai-v2/Grove-vision-ai-v2-software-supported.md b/docs/Sensor/Grove/Grove_Sensors/AI-powered/Grove-vision-ai-v2/Grove-vision-ai-v2-software-supported.md
index ead2b2ae78a1..6955755902c1 100644
--- a/docs/Sensor/Grove/Grove_Sensors/AI-powered/Grove-vision-ai-v2/Grove-vision-ai-v2-software-supported.md
+++ b/docs/Sensor/Grove/Grove_Sensors/AI-powered/Grove-vision-ai-v2/Grove-vision-ai-v2-software-supported.md
@@ -104,8 +104,12 @@ We can see that in the Preview Settings on the right hand side, there are two se
-At this point, you have finished uploading the model and observing the results.
+:::tip
+- **Confidence:** This tells you how sure the computer vision model is about its guess. Think of it like a percentage: higher confidence means the model is more certain.
+- **IoU (Intersection over Union):** This measures how much overlap there is between two boxes. Imagine you drew a box around an object in a picture, and the model also drew a box. IoU tells you how well your boxes match up. Higher IoU means the boxes are closer together.
+:::
+At this point, you have finished uploading the model and observing the results.
## Program on Arduino connecting with Seeed Studio XIAO Board
@@ -484,6 +488,12 @@ In the `loop()` function:
This setup allows for interactive communication with the Grove Vision AI V2 module, enabling users to send instructions to and receive data from the module over a serial connection.
+
+## Resources
+- [SenseCraft AI](https://sensecraft.seeed.cc/ai/#/home)
+- [SenseCraft AI Model Assistant](https://seeed-studio.github.io/SenseCraft-Web-Toolkit/#/setup/process)
+- [Arduino Library for XIAO](https://github.com/Seeed-Studio/Seeed_Arduino_SSCMA)
+
## Troubleshooting
### Q1: Why can't I see the recognised result on the port after I successfully upload the code of Demo1 using XIAO ESP32C3?
diff --git a/docs/Sensor/Grove/Grove_Sensors/AI-powered/Grove-vision-ai-v2/Grove-vision-ai-v2.md b/docs/Sensor/Grove/Grove_Sensors/AI-powered/Grove-vision-ai-v2/Grove-vision-ai-v2.md
index ce60919b22a2..771df3ea8ad2 100644
--- a/docs/Sensor/Grove/Grove_Sensors/AI-powered/Grove-vision-ai-v2/Grove-vision-ai-v2.md
+++ b/docs/Sensor/Grove/Grove_Sensors/AI-powered/Grove-vision-ai-v2/Grove-vision-ai-v2.md
@@ -61,11 +61,15 @@ Once you have the Grove Vision AI V2 and camera ready to go, then you can connec
-
Users who purchased Grove Vision AI V2 before February 21, 2024, do not have support for Raspberry Pi cameras. However, users who purchase after this date will have added support for those specific models that support images.
-::: -->
+:::
+
+
## Boot / Reset / Flashed Driver
@@ -101,6 +105,15 @@ If you find that the Grove Vision AI V2 is not recognised after connecting it to
- Windows CDC driver: [CH343CDC.ZIP](https://files.seeedstudio.com/wiki/grove-vision-ai-v2/res/CH343SER.ZIP)
- macOS Vendor VCP Driver: [CH34xSER_MAC.ZIP](https://files.seeedstudio.com/wiki/grove-vision-ai-v2/res/CH341SER_MAC.ZIP)
+:::tip
+Usage on Linux, you need to add the following, the following is UBUNTU, other systems are similar, but will not list them
+```cpp
+sudo echo 'USBSYTEM=="tty", ATTRS{idVendor}=="1a86", ATTRS{idProduct}=="55d3", MODE:="0666"' > /etc/udev/rules.d/99-grove-vision-ai.rules
+sudo udevadm control --reload-rules
+sudo udevadm trigger
+```
+:::
+
### Bootloader Recovery Tool Manual
This part describes how to recover the bootloader of the Grove Vision AI (WE2) module. The recovery tool is a software tool that can be used to recover the bootloader of the Grove Vision AI (WE2) module in case the bootloader is corrupted, or flash a new firmware to the Grove Vision AI (WE2) module.
diff --git a/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_RP2040/XIAO-RP2040-Zephyr-RTOS.md b/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_RP2040/XIAO-RP2040-Zephyr-RTOS.md
new file mode 100644
index 000000000000..5634522dd965
--- /dev/null
+++ b/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_RP2040/XIAO-RP2040-Zephyr-RTOS.md
@@ -0,0 +1,514 @@
+---
+description: XIAO RP2040 With Zephyr(RTOS)
+title: XIAO RP2040 With Zephyr(RTOS)
+keywords:
+- Sorftware
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /XIAO-RP2040-Zephyr-RTOS
+last_update:
+ date: 3/20/2024
+ author: timo614
+---
+
+# XIAO RP2040 With Zephyr(RTOS)
+
+
+
+This wiki covers [Zephyr](https://www.zephyrproject.org/) support for the [Seeed Studio XIAO RP2040](https://wiki.seeedstudio.com/xiao_rp2040_getting_started/). With the assistance of this guide you will be able to utilize the feature set available to the board.
+
+## What is [Zephyr](https://www.zephyrproject.org/)
+
+
+
+The [**Zephyr**](https://www.zephyrproject.org/) OS is based on a small-footprint kernel designed for use on resource-constrained and embedded systems: from simple embedded environmental sensors and LED wearables to sophisticated embedded controllers, smart watches, and IoT wireless applications.
+
+For each supported device Zephyr has a [devicetree](https://docs.zephyrproject.org/latest/build/dts/index.html) file that describes the board and its features. The [Xiao RP2040 Zephyr board page](https://docs.zephyrproject.org/latest/boards/seeed/xiao_rp2040/doc/index.html#supported-features) describes the supported features currently available which is defined by the [board's dts file](https://github.com/zephyrproject-rtos/zephyr/blob/main/boards/seeed/xiao_rp2040/xiao_rp2040.yaml#L7).
+
+*Reference: [**Zephyr Project**](https://docs.zephyrproject.org/latest/introduction/index.html#)*
+
+## Getting Started
+
+The first step to working with Zephyr is to get the SDK and toolchain setup for local development. The [Zephyr getting started guide](https://docs.zephyrproject.org/latest/develop/getting_started/index.html) should be referenced for the associated setup procedure needed for your environment.
+
+Once the Zephyr toolchain has been setup and an associated SDK has been downloaded you can begin application development.
+
+For the Xiao RP2040 the [board description file](https://docs.zephyrproject.org/latest/boards/seeed/xiao_rp2040/doc/index.html) can be referenced for further setup information.
+
+To program the Xiao RP2040 the following steps can be taken:
+1. Build an example or your application
+2. Plugin the Xiao RP2040
+3. Hold the button designated `B` (boot) and press `R` (reset) which will mount the device as a mass storage device
+4. Drag the uf2 file (ie `build/zephyr/zephyr.uf2`) generated during the build process to the device triggering an update
+
+The simplest example is to run the "Hello World" sample on the board. After changing to the directory of the Zephyr install run the following commands.
+
+```
+west build -p always -b xiao_rp2040 samples/subsys/usb/console
+```
+
+After this completes enter the `build/zephyr` folder and drag `zephyr.uf2` to your waiting RP2040 mounted drive. The device will reset after it receives the file and your machine should now be connected over USB for serial.
+
+Find the port for your device by typing `ls /dev/tty*` and confirming which device appears when your USB has been plugged in.
+
+In my example I see `/dev/ttyACM0` as the newly added device.
+
+Using screen you can then connect and monitor the serial response:
+```
+screen /dev/ttyACM0 115200
+```
+
+You should see a response similar to the following:
+```
+*** Booting Zephyr OS build v3.6.0-2212-gc38ea288eee9 ***
+Hello World! arm
+Hello World! arm
+Hello World! arm
+```
+
+To assist with the process of using Zephyr with Xiao and its expansion board a repository has been constructed with several overlays and configurations used here. The commands included in this wiki article assume it is located `../applications/xiao-zephyr-examples` relative to the zephyr root. An alternative path can be provided to the commands below by updating it.
+
+```
+git clone https://github.com/Cosmic-Bee/xiao-zephyr-examples
+```
+
+## Hardware Preparation
+
+If you want to follow this tutorial through everything, you will need to prepare the following.
+
+
+
+### Getting start with reComputer series
+
+We have added the Getting start Pages for reComputer series. Here are the links:
+
+[Getting start with reComputer J1010](https://wiki.seeedstudio.com/reComputer_J1010_with_Jetson_getting_start)
+
+[Getting start with reComputer J1020V2](https://wiki.seeedstudio.com/reComputer_J1020v2_with_Jetson_getting_start)
+
+[Getting start with reComputer J30/40](https://wiki.seeedstudio.com/reComputer_J30_40_with_Jetson_getting_start)
+
+## Existed Wiki Updated
+
+### [Grove - EMG Detector](https://wiki.seeedstudio.com/Grove-EMG_Detector/)
+
+We have added a Tips for the part list of Grove - EMG Detector
+
+The part list of this product has been updated recently. You may receive connecting wires of two specifications, their functions are completely identical, only the colors are different,the corresponding relationship is shown in the diagram below.
+
+
+
+
+
+## Past Weekly wiki
+
+- [weekly wiki on 2.27th](/Seeed_Elderly/weekly_wiki/wiki227)
+- [weekly wiki on 3.06th](/Seeed_Elderly/weekly_wiki/wiki306)
+- [weekly wiki on 3.13th](/Seeed_Elderly/weekly_wiki/wiki313)
+- [weekly wiki on 3.20th](/Seeed_Elderly/weekly_wiki/wiki320)
+- [weekly wiki on 3.27th](/Seeed_Elderly/weekly_wiki/wiki327)
+- [weekly wiki on 4.03rd](/Seeed_Elderly/weekly_wiki/wiki403)
+- [weekly wiki on 4.10th](/Seeed_Elderly/weekly_wiki/wiki410)
+- [weekly wiki on 4.17th](/Seeed_Elderly/weekly_wiki/wiki417)
+- [weekly wiki on 4.24th](/Seeed_Elderly/weekly_wiki/wiki424)
+- [weekly wiki on 5.15th](/Seeed_Elderly/weekly_wiki/wiki515)
+- [weekly wiki on 5.22nd](/Seeed_Elderly/weekly_wiki/wiki522)
+- [weekly wiki on 5.29th](/Seeed_Elderly/weekly_wiki/wiki529)
+- [weekly wiki on 6.05th](/Seeed_Elderly/weekly_wiki/wiki605)
+- [weekly wiki on 6.12th](/Seeed_Elderly/weekly_wiki/wiki612)
+- [weekly wiki on 6.19th](/Seeed_Elderly/weekly_wiki/wiki619)
+- [weekly wiki on 7.03th](/Seeed_Elderly/weekly_wiki/wiki703)
+- [weekly wiki on 7.10th](/Seeed_Elderly/weekly_wiki/wiki710)
+- [weekly wiki on 7.17th](/Seeed_Elderly/weekly_wiki/wiki717)
+- [weekly wiki on 7.24th](/Seeed_Elderly/weekly_wiki/wiki724)
+- [weekly wiki on 7.31th](/Seeed_Elderly/weekly_wiki/wiki731)
+- [weekly wiki on 8.07th](/Seeed_Elderly/weekly_wiki/wiki807)
+- [weekly wiki on 8.21st](/Seeed_Elderly/weekly_wiki/wiki821)
+- [weekly wiki on 8.28th](/Seeed_Elderly/weekly_wiki/wiki828)
+- [weekly wiki on 9.11st](/Seeed_Elderly/weekly_wiki/wiki911)
+- [weekly wiki on 9.18th](/Seeed_Elderly/weekly_wiki/wiki918)
+- [weekly wiki on 9.25th](/Seeed_Elderly/weekly_wiki/wiki925)
+- [weekly wiki on 10.9th](/Seeed_Elderly/weekly_wiki/wiki1009)
+- [weekly wiki on 10.16th](/Seeed_Elderly/weekly_wiki/wiki1016)
+- [weekly wiki on 10.23th](/Seeed_Elderly/weekly_wiki/wiki1023)
+- [weekly wiki on 10.30th](/Seeed_Elderly/weekly_wiki/wiki1030)
+- [weekly wiki on 11.06th](/Seeed_Elderly/weekly_wiki/wiki1106)
+- [weekly wiki on 11.13th](/Seeed_Elderly/weekly_wiki/wiki1113)
+- [weekly wiki on 11.20th](/Seeed_Elderly/weekly_wiki/wiki1120)
+- [weekly wiki on 11.27th](/Seeed_Elderly/weekly_wiki/wiki1127)
+- [weekly wiki on 12.04th](/Seeed_Elderly/weekly_wiki/wiki1204)
+- [weekly wiki on 12.11th](/Seeed_Elderly/weekly_wiki/wiki1211)
+- [weekly wiki on 12.18th](/Seeed_Elderly/weekly_wiki/wiki1218)
+- [weekly wiki on 12.25th](/Seeed_Elderly/weekly_wiki/wiki1225)
+- [weekly wiki on 2024.1.08th](/Seeed_Elderly/weekly_wiki/wiki240108)
+- [weekly wiki on 2024.1.15th](/Seeed_Elderly/weekly_wiki/wiki240115)
+- [weekly wiki on 2024.1.22nd](/Seeed_Elderly/weekly_wiki/wiki240122)
+- [weekly wiki on 2024.1.29th](/Seeed_Elderly/weekly_wiki/wiki240129)
+- [weekly wiki on 2024.2.19th](/Seeed_Elderly/weekly_wiki/wiki240219)
+- [weekly wiki on 2024.2.26th](/Seeed_Elderly/weekly_wiki/wiki240226)
+- [weekly wiki on 2024.3.04th](/Seeed_Elderly/weekly_wiki/wiki240304)
+- [weekly wiki on 2024.3.11th](/Seeed_Elderly/weekly_wiki/wiki240311)
+- [weekly wiki on 2024.3.18th](/Seeed_Elderly/weekly_wiki/wiki240318)
+- [weekly wiki on 2024.3.25th](/Seeed_Elderly/weekly_wiki/wiki240325)
+- [weekly wiki on 2024.4.01st](/Seeed_Elderly/weekly_wiki/wiki240401)
diff --git a/docs/Sensor/Grove/Grove_Sensors/AI-powered/Grove-vision-ai-v2/Grove-vision-ai-v2-camera-supported.md b/docs/Sensor/Grove/Grove_Sensors/AI-powered/Grove-vision-ai-v2/Grove-vision-ai-v2-camera-supported.md
index 1114bdf75074..d44c754a4471 100644
--- a/docs/Sensor/Grove/Grove_Sensors/AI-powered/Grove-vision-ai-v2/Grove-vision-ai-v2-camera-supported.md
+++ b/docs/Sensor/Grove/Grove_Sensors/AI-powered/Grove-vision-ai-v2/Grove-vision-ai-v2-camera-supported.md
@@ -36,6 +36,10 @@ The other CSI cameras are theoretically supported, but due to the fact that some
- [IMX390 2.12MP 118°(H) FOV 4-lane MIPI CSI Camera](https://www.seeedstudio.com/IMX390-2-12MP-118-H-FOV-4-lane-MIPI-CSI-Camera-p-5708.html)
- [IMX219 M12/CS mount CMOS Camera Module](https://www.seeedstudio.com/IMX-219-CMOS-camera-module-M12-and-CS-camera-available-p-5372.html)
+
+Grove Vision AI V2 now supports Raspberry Pi cameras for users who purchase after February 21, 2024. However, users who purchased before this date currently do not have support for these specific camera models that work with image input. The team is actively working on a solution to extend this functionality to early purchasers as well.
+
+
## Resources
diff --git a/docs/Sensor/Grove/Grove_Sensors/AI-powered/Grove-vision-ai-v2/Grove-vision-ai-v2-software-supported.md b/docs/Sensor/Grove/Grove_Sensors/AI-powered/Grove-vision-ai-v2/Grove-vision-ai-v2-software-supported.md
index ead2b2ae78a1..6955755902c1 100644
--- a/docs/Sensor/Grove/Grove_Sensors/AI-powered/Grove-vision-ai-v2/Grove-vision-ai-v2-software-supported.md
+++ b/docs/Sensor/Grove/Grove_Sensors/AI-powered/Grove-vision-ai-v2/Grove-vision-ai-v2-software-supported.md
@@ -104,8 +104,12 @@ We can see that in the Preview Settings on the right hand side, there are two se
-At this point, you have finished uploading the model and observing the results.
+:::tip
+- **Confidence:** This tells you how sure the computer vision model is about its guess. Think of it like a percentage: higher confidence means the model is more certain.
+- **IoU (Intersection over Union):** This measures how much overlap there is between two boxes. Imagine you drew a box around an object in a picture, and the model also drew a box. IoU tells you how well your boxes match up. Higher IoU means the boxes are closer together.
+:::
+At this point, you have finished uploading the model and observing the results.
## Program on Arduino connecting with Seeed Studio XIAO Board
@@ -484,6 +488,12 @@ In the `loop()` function:
This setup allows for interactive communication with the Grove Vision AI V2 module, enabling users to send instructions to and receive data from the module over a serial connection.
+
+## Resources
+- [SenseCraft AI](https://sensecraft.seeed.cc/ai/#/home)
+- [SenseCraft AI Model Assistant](https://seeed-studio.github.io/SenseCraft-Web-Toolkit/#/setup/process)
+- [Arduino Library for XIAO](https://github.com/Seeed-Studio/Seeed_Arduino_SSCMA)
+
## Troubleshooting
### Q1: Why can't I see the recognised result on the port after I successfully upload the code of Demo1 using XIAO ESP32C3?
diff --git a/docs/Sensor/Grove/Grove_Sensors/AI-powered/Grove-vision-ai-v2/Grove-vision-ai-v2.md b/docs/Sensor/Grove/Grove_Sensors/AI-powered/Grove-vision-ai-v2/Grove-vision-ai-v2.md
index ce60919b22a2..771df3ea8ad2 100644
--- a/docs/Sensor/Grove/Grove_Sensors/AI-powered/Grove-vision-ai-v2/Grove-vision-ai-v2.md
+++ b/docs/Sensor/Grove/Grove_Sensors/AI-powered/Grove-vision-ai-v2/Grove-vision-ai-v2.md
@@ -61,11 +61,15 @@ Once you have the Grove Vision AI V2 and camera ready to go, then you can connec
-
Users who purchased Grove Vision AI V2 before February 21, 2024, do not have support for Raspberry Pi cameras. However, users who purchase after this date will have added support for those specific models that support images.
-::: -->
+:::
+
+
## Boot / Reset / Flashed Driver
@@ -101,6 +105,15 @@ If you find that the Grove Vision AI V2 is not recognised after connecting it to
- Windows CDC driver: [CH343CDC.ZIP](https://files.seeedstudio.com/wiki/grove-vision-ai-v2/res/CH343SER.ZIP)
- macOS Vendor VCP Driver: [CH34xSER_MAC.ZIP](https://files.seeedstudio.com/wiki/grove-vision-ai-v2/res/CH341SER_MAC.ZIP)
+:::tip
+Usage on Linux, you need to add the following, the following is UBUNTU, other systems are similar, but will not list them
+```cpp
+sudo echo 'USBSYTEM=="tty", ATTRS{idVendor}=="1a86", ATTRS{idProduct}=="55d3", MODE:="0666"' > /etc/udev/rules.d/99-grove-vision-ai.rules
+sudo udevadm control --reload-rules
+sudo udevadm trigger
+```
+:::
+
### Bootloader Recovery Tool Manual
This part describes how to recover the bootloader of the Grove Vision AI (WE2) module. The recovery tool is a software tool that can be used to recover the bootloader of the Grove Vision AI (WE2) module in case the bootloader is corrupted, or flash a new firmware to the Grove Vision AI (WE2) module.
diff --git a/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_RP2040/XIAO-RP2040-Zephyr-RTOS.md b/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_RP2040/XIAO-RP2040-Zephyr-RTOS.md
new file mode 100644
index 000000000000..5634522dd965
--- /dev/null
+++ b/docs/Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_RP2040/XIAO-RP2040-Zephyr-RTOS.md
@@ -0,0 +1,514 @@
+---
+description: XIAO RP2040 With Zephyr(RTOS)
+title: XIAO RP2040 With Zephyr(RTOS)
+keywords:
+- Sorftware
+image: https://files.seeedstudio.com/wiki/wiki-platform/S-tempor.png
+slug: /XIAO-RP2040-Zephyr-RTOS
+last_update:
+ date: 3/20/2024
+ author: timo614
+---
+
+# XIAO RP2040 With Zephyr(RTOS)
+
+
+
+This wiki covers [Zephyr](https://www.zephyrproject.org/) support for the [Seeed Studio XIAO RP2040](https://wiki.seeedstudio.com/xiao_rp2040_getting_started/). With the assistance of this guide you will be able to utilize the feature set available to the board.
+
+## What is [Zephyr](https://www.zephyrproject.org/)
+
+
+
+The [**Zephyr**](https://www.zephyrproject.org/) OS is based on a small-footprint kernel designed for use on resource-constrained and embedded systems: from simple embedded environmental sensors and LED wearables to sophisticated embedded controllers, smart watches, and IoT wireless applications.
+
+For each supported device Zephyr has a [devicetree](https://docs.zephyrproject.org/latest/build/dts/index.html) file that describes the board and its features. The [Xiao RP2040 Zephyr board page](https://docs.zephyrproject.org/latest/boards/seeed/xiao_rp2040/doc/index.html#supported-features) describes the supported features currently available which is defined by the [board's dts file](https://github.com/zephyrproject-rtos/zephyr/blob/main/boards/seeed/xiao_rp2040/xiao_rp2040.yaml#L7).
+
+*Reference: [**Zephyr Project**](https://docs.zephyrproject.org/latest/introduction/index.html#)*
+
+## Getting Started
+
+The first step to working with Zephyr is to get the SDK and toolchain setup for local development. The [Zephyr getting started guide](https://docs.zephyrproject.org/latest/develop/getting_started/index.html) should be referenced for the associated setup procedure needed for your environment.
+
+Once the Zephyr toolchain has been setup and an associated SDK has been downloaded you can begin application development.
+
+For the Xiao RP2040 the [board description file](https://docs.zephyrproject.org/latest/boards/seeed/xiao_rp2040/doc/index.html) can be referenced for further setup information.
+
+To program the Xiao RP2040 the following steps can be taken:
+1. Build an example or your application
+2. Plugin the Xiao RP2040
+3. Hold the button designated `B` (boot) and press `R` (reset) which will mount the device as a mass storage device
+4. Drag the uf2 file (ie `build/zephyr/zephyr.uf2`) generated during the build process to the device triggering an update
+
+The simplest example is to run the "Hello World" sample on the board. After changing to the directory of the Zephyr install run the following commands.
+
+```
+west build -p always -b xiao_rp2040 samples/subsys/usb/console
+```
+
+After this completes enter the `build/zephyr` folder and drag `zephyr.uf2` to your waiting RP2040 mounted drive. The device will reset after it receives the file and your machine should now be connected over USB for serial.
+
+Find the port for your device by typing `ls /dev/tty*` and confirming which device appears when your USB has been plugged in.
+
+In my example I see `/dev/ttyACM0` as the newly added device.
+
+Using screen you can then connect and monitor the serial response:
+```
+screen /dev/ttyACM0 115200
+```
+
+You should see a response similar to the following:
+```
+*** Booting Zephyr OS build v3.6.0-2212-gc38ea288eee9 ***
+Hello World! arm
+Hello World! arm
+Hello World! arm
+```
+
+To assist with the process of using Zephyr with Xiao and its expansion board a repository has been constructed with several overlays and configurations used here. The commands included in this wiki article assume it is located `../applications/xiao-zephyr-examples` relative to the zephyr root. An alternative path can be provided to the commands below by updating it.
+
+```
+git clone https://github.com/Cosmic-Bee/xiao-zephyr-examples
+```
+
+## Hardware Preparation
+
+If you want to follow this tutorial through everything, you will need to prepare the following.
+
+
+
+ | Seeed Studio XIAO RP2040 Sense |
+ Seeed Studio Expansion Board |
+
+
+ |
+ |
+
+
+ |
+ |
+
+
+
+### Developer Knowledge
+
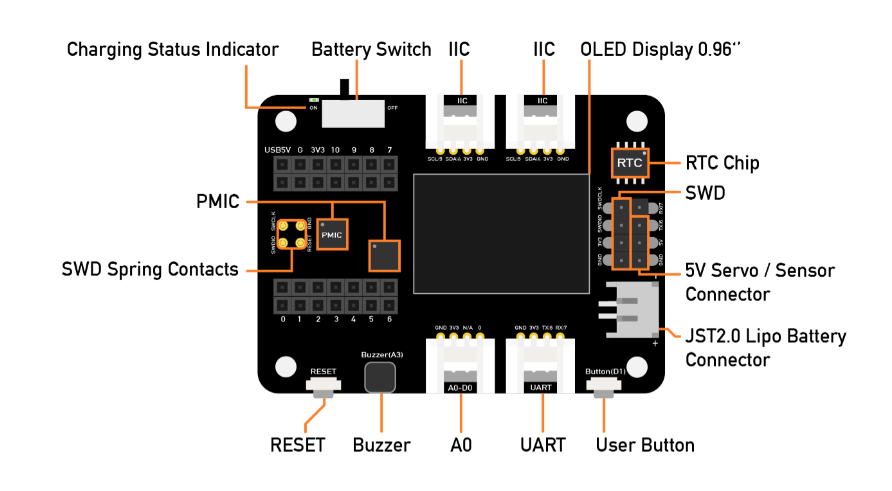
+#### XIAO Expansion Board
+
+ In order to use Grove modules with Seeed Studio XIAO RP2040, we will use a [Seeed Studio Expansion Base for XIAO](https://www.seeedstudio.com/Seeeduino-XIAO-Expansion-board-p-4746.html) and connect XIAO RP2040 on it.
+
+ After that, the Grove connectors on the board can be used to connect Grove modules
+
+
+
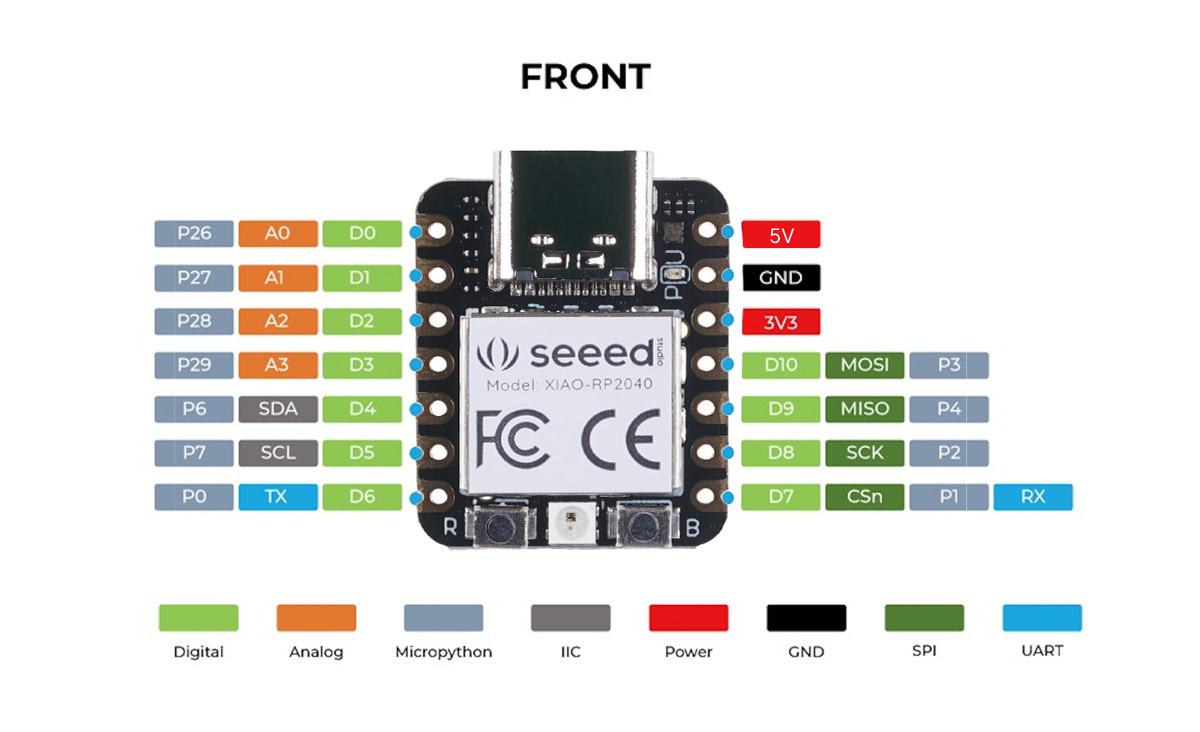
+#### Pin Definitions
+
+ You need to follow the graphic below to use the appropriate internal pin numbers when connecting the Grove modules to the Grove connectors on Grove Shield for Seeed Studio XIAO.
+
+
+
+### Primary Functionality
+
+
+ - WS2812 LED
+ - LED PWM
+ - Clock
+ - TFLite
+
+
+#### WS2812 LED
+
+For this example the Xiao RP2040 utilizes its onboard LED and flashes through red, green, and blue continually.
+
+To test this setup we can use an existing sample with Zephyr:
+
+```
+cd ~/zephyrproject/zephyr
+west build -p always -b xiao_rp2040 samples/drivers/led_strip
+```
+
+You'll see the onboard WS2812 LED cycling through red, blue and green continually in a flashing pattern.
+
+Let's dive into this example a bit to see why it works:
+```
+
+ / {
+ aliases {
+ led-strip = &ws2812;
+ };
+ }
+ &gpio0 {
+ status = "okay";
+ neopixel-power-enable {
+ gpio-hog;
+ gpios = <11 GPIO_ACTIVE_HIGH>;
+ output-high;
+ };
+ };
+ &pio0 {
+ status = "okay";
+
+ pio-ws2812 {
+ compatible = "worldsemi,ws2812-rpi_pico-pio";
+ status = "okay";
+ pinctrl-0 = <&ws2812_pio0_default>;
+ pinctrl-names = "default";
+ bit-waveform = <3>, <3>, <4>;
+
+ ws2812: ws2812 {
+ status = "okay";
+ gpios = <&gpio0 12 GPIO_ACTIVE_HIGH>;
+ chain-length = <1>;
+ color-mapping = ;
+ reset-delay = <280>;
+ frequency = <800000>;
+ };
+ };
+ };
+```
+
+These elements of the device tree show the onboard WS2812 and its utilization. Given the WS2812 has its VCC line set to the RP2040's pin 11 the devicetree utilizes the gpio-hog functionality to allow the LED to be enabled via environment variables. In this case pin 12 is the one setup for the WS2812 dataline so with the CONFIG_GPIO_HOGS environment variable enabled the LED strip is able to be used for the example.
+
+This works in part because the example has an xiao_rp2040.conf file as part of its boards directory so it merges that configuration with the board's configuration and enables it.
+
+```
+CONFIG_GPIO=y
+CONFIG_GPIO_HOGS=y
+```
+
+If you wish to utilize the onboard WS2812 it is advisable to enable this variable to allow it to draw power.
+
+
+ - [Grove - Expansion Board](https://www.seeedstudio.com/Seeeduino-XIAO-Expansion-board-p-4746.html) - I2C Display
+ - [Grove - Expansion Board](https://www.seeedstudio.com/Seeeduino-XIAO-Expansion-board-p-4746.html) - Button
+ - [Grove - Temperature and Humidity Sensor (SHT31)](https://www.seeedstudio.com/Grove-Temperature-Humidity-Sensor-SHT31.html)
+ - [1.69inch LCD Display Module, 240×280 Resolution, SPI Interface](https://www.seeedstudio.com/1-69inch-240-280-Resolution-IPS-LCD-Display-Module-p-5755.html)
+
+
+#### Grove - Expansion Board - I2C Display
+
+
+
+To test this setup we can use an existing sample with Zephyr:
+
+```
+cd ~/zephyrproject/zephyr
+west build -p always -b xiao_rp2040 samples/drivers/display -- -DDTC_OVERLAY_FILE=$(dirname $(pwd))/applications/xiao-zephyr-examples/xiao-rp2040/xiao-expansion.overlay -DEXTRA_CONF_FILE=$(dirname $(pwd))/applications/xiao-zephyr-examples/xiao-rp2040/samples.conf
+```
+
+You'll see a display showing multiple black boxes and a blinking box in the corner given this display only supports two colors.
+
+Let's dive into this example a bit to see why it works:
+```
+/ {
+ chosen {
+ zephyr,display = &ssd1306;
+ };
+};
+
+&i2c1 {
+ status = "okay";
+
+ ssd1306: ssd1306@3c {
+ compatible = "solomon,ssd1306fb";
+ reg = <0x3c>;
+ width = <128>;
+ height = <64>;
+ segment-offset = <0>;
+ page-offset = <0>;
+ display-offset = <0>;
+ multiplex-ratio = <63>;
+ segment-remap;
+ com-invdir;
+ prechargep = <0x22>;
+ };
+};
+
+```
+
+The app overlay file in this example sets up a SSD1306 OLED screen at the 0x3C register. It is selected as the zephyr display in the chosen section.
+
+```
+CONFIG_LV_Z_VDB_SIZE=64
+CONFIG_LV_COLOR_DEPTH_1=y
+CONFIG_I2C=y
+```
+
+The associated configuration file enables the OLED screen to properly render by setting its depth to 1 and enabling I2C for the project.
+
+#### Grove - Expansion Board - Button
+
+To test this setup we can use an existing sample with Zephyr which we will use along with the USB console overlay and conf.
+
+```
+cd ~/zephyrproject/zephyr
+west build -p always -b xiao_rp2040 samples/basic/button -- -DDTC_OVERLAY_FILE="$(dirname $(pwd))/applications/xiao-zephyr-examples/xiao-rp2040/xiao-expansion.overlay $(dirname $(pwd))/applications/xiao-zephyr-examples/xiao-rp2040/console.overlay" -DEXTRA_CONF_FILE=$(dirname $(pwd))/applications/xiao-zephyr-examples/xiao-rp2040/console.conf
+```
+
+After uploading the uf2 file connect to monitor:
+```
+screen /dev/ttyACM0 115200
+```
+
+Pressing the button with the sample will trigger the onboard LED to light up.
+
+You will see results returned from the console:
+
+```
+*** Booting Zephyr OS build v3.6.0-2212-gc38ea288eee9 ***
+Set up button at gpio@40014000 pin 27
+Set up LED at gpio@40014000 pin 25
+Press the button
+Button pressed at 1934761489
+Button pressed at 2178879257
+Button pressed at 3084766465
+Button pressed at 3388674993
+```
+
+Let's dive into this example a bit to see why it works:
+```
+/ {
+ aliases {
+ sw0 = &button0;
+ };
+
+ buttons {
+ compatible = "gpio-keys";
+ button0: button_0 {
+ gpios = <&gpio0 27 (GPIO_PULL_UP | GPIO_ACTIVE_LOW)>;
+ label = "Expansion Board Button";
+ };
+ };
+};
+```
+
+The app overlay file is used to setup various board components. Using this file the button example can be utilized as the overlay allows the Zephyr to configure the button and make it available for the associated code.
+
+In this case GPIO 27 corresponds with Pin A1/D1 on the Xiao RP2040. It is setup in this overlay to act as a button and is aliased to the sw0 name to allow it to be used for the sample which has code expecting this.
+
+
+#### Grove - Temperature and Humidity Sensor (SHT31)
+
+First solder on pins and connect your Xiao RP2040 to the expansion board. Then connect a grove connector cable between the Grove SHT31 and one of the I2C ports on the expansion board.
+
+
+
+To test this setup we can use an existing sample with Zephyr which we will enable USB console support with our overlay and conf.
+
+```
+cd ~/zephyrproject/zephyr
+west build -p always -b xiao_rp2040 samples/sensor/sht3xd -- -DDTC_OVERLAY_FILE="$(dirname $(pwd))/applications/xiao-zephyr-examples/xiao-rp2040/sht31.overlay $(dirname $(pwd))/applications/xiao-zephyr-examples/xiao-rp2040/console.overlay" -DEXTRA_CONF_FILE=$(dirname $(pwd))/applications/xiao-zephyr-examples/xiao-rp2040/console.conf
+```
+
+After uploading the uf2 file connect to monitor:
+```
+screen /dev/ttyACM0 115200
+```
+
+You will see results returned from the console:
+```
+*** Booting Zephyr OS build v3.6.0-2212-gc38ea288eee9 ***
+SHT3XD: 26.20 Cel ; 52.49 %RH
+SHT3XD: 26.19 Cel ; 52.69 %RH
+SHT3XD: 26.20 Cel ; 52.75 %RH
+SHT3XD: 26.24 Cel ; 52.88 %RH
+SHT3XD: 26.24 Cel ; 52.67 %RH
+SHT3XD: 26.23 Cel ; 52.49 %RH
+SHT3XD: 26.23 Cel ; 52.48 %RH
+SHT3XD: 26.24 Cel ; 52.30 %RH
+```
+
+Let's dive into this example a bit to see why it works:
+```
+ &i2c1 {
+ sht3xd@44 {
+ compatible = "sensirion,sht3xd";
+ reg = <0x44>;
+ };
+ };
+```
+
+The app overlay file is used to setup various board components. Using this file the SHT31 example can be utilized as the overlay informs the [sample logic](https://github.com/zephyrproject-rtos/zephyr/blob/main/samples/sensor/sht3xd/src/main.c) how to configure the sensor for our board.
+
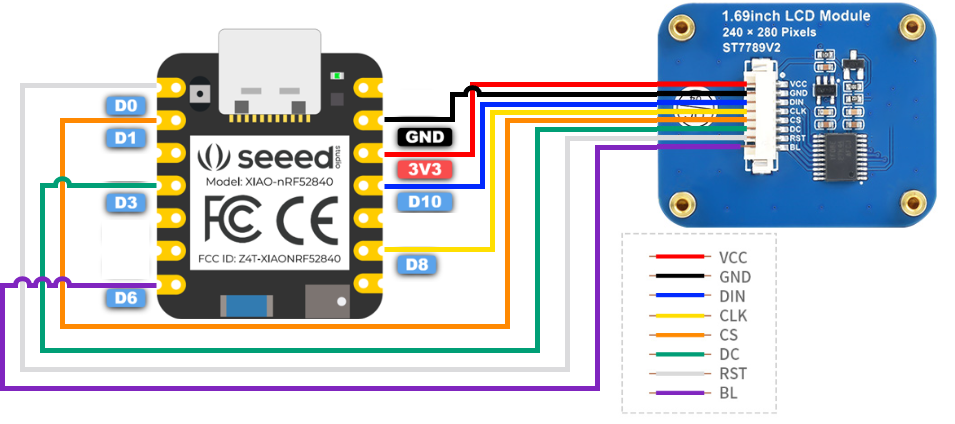
+#### 1.69inch LCD Display Module, 240×280 Resolution, SPI Interface
+
+For this example we'll use SPI to connect to a 1.69 inch LCD with a 240x280 resolution.
+
+First connect your board to the LCD screen using the following image as a guide (in this case we're using the Xiao RP2040 but the same pin layout is used for connecting here).
+
+| 1.69-inch LCD SPI Display| XIAO RP2040 |
+| ------------- | ------------------------- |
+| VCC | 3V3 |
+| GND | GND |
+| DIN | D10 |
+| CLK | D8 |
+| CS | D1 |
+| DC | D3 |
+| RST | D0 |
+| BL | D6 |
+
+
+
+Next with the hardware prepared we can build the uf2 file for flashing:
+```
+cd ~/zephyrproject/zephyr
+west build -p always -b xiao_rp2040 samples/drivers/display -- -DDTC_OVERLAY_FILE=$(dirname $(pwd))/applications/xiao-zephyr-examples/xiao-rp2040/240x280_st7789v2.overlay -DEXTRA_CONF_FILE=$(dirname $(pwd))/applications/xiao-zephyr-examples/xiao-rp2040/240x280_st7789v2.conf
+```
+
+When this completes, move the build file from `build/zephyr/zephyr.uf2` to the mounted Xiao RP2040 (remember you can hold the boot button down while plugging in to enter this state) which will reset the device with the new firmware.
+
+With the new firmware in place the device now shows the same demo screen we saw previously on the expansion board just now updated for the color LCD over SPI.
+
+
+
+
+## ✨ Contributor Project
+
+- This project is supported by the Seeed Studio [Contributor Project](https://github.com/orgs/Seeed-Studio/projects/6/views/1?pane=issue&itemId=57293558).
+- Thanks **Tim's efforts** and your work will be [exhibited](https://wiki.seeedstudio.com/Honorary-Contributors/).
+
+
+## Tech Support & Product Discussion
+
+Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.
+
+
+
+
diff --git a/docs/weekly_wiki.md b/docs/weekly_wiki.md
index f254fdc7aee2..846b0f4291a7 100644
--- a/docs/weekly_wiki.md
+++ b/docs/weekly_wiki.md
@@ -5,7 +5,7 @@ keywords:
- weeely wiki
image: https://files.seeedstudio.com/wiki/IndexWiki/logo_image.jpg
last_update:
- date: 04/08/2024
+ date: 04/15/2024
author: Seraphina
---
@@ -17,46 +17,68 @@ This is Seraphina in Seeed Studio and welcome to the Seeed Studio weekly wiki! E
✨ For each week, when a collaborator contributes a project or fixes something important, we put the stars at the end of title of "Weekly Wiki" for more people be able to see their efforts👍.
-Today is April 8th and a brand new week has begun! Check out what Seeed Studio did last week!
+Today is April 15th and a brand new week has begun! Check out what Seeed Studio did last week!
## Latest Wiki Launched
-### [Intergating Historian Module for Visualizing on reTerminal DM](https://wiki.seeedstudio.com/reTerminalDM_N3uron_Historian/)
+### [Arduino Programming with Seeed Studio XIAO ESP32C6](https://wiki.seeedstudio.com/xiao_pin_multiplexing_esp33c6/)
-Introducing [N3uron](https://n3uron.com/) Historian: a powerful time-series storage system built on MongoDB. Easily configure it to store data from MongoDB in x64 bit, x32 bit and ARM architectures. With Neuron Historian, you can store tag values collected locally or remotely via N3uron Links. Plus, it offers a handy Store & Forward feature for data retention during communication loss. Thanks to efficient compression and partitioning, it handles massive data volumes without performance loss. For reference, 1GB of storage can hold around 100 million events.
+This Wiki describes how to use the XIAO ESP32C6 pins on an Arduino.
-
+
-### Getting start with reComputer series
+### [WiFi Usage with Seeed Studio XIAO ESP32C6](https://wiki.seeedstudio.com/xiao_wifi_usage_esp32c6/)
-We have added the Getting start Pages for reComputer series. Here are the links:
+In this tutorial, we will explore how to leverage the XIAO ESP32C6's Wi-Fi capabilities to connect to a Wi-Fi network and perform basic networking tasks.
-[Getting start with reComputer J1010](https://wiki.seeedstudio.com/reComputer_J1010_with_Jetson_getting_start)
+### [Empowering AI with AWS IoT Core for the XIAO ESP32C6](https://wiki.seeedstudio.com/xiao_esp32c6_aws_iot/)
+
+This Wiki serves as a comprehensive guide to deploying an advanced IoT system that harnesses the power of AWS services and the XIAO ESP32C6 microcontroller to monitor and analyze environmental data. Beginning with the seamless collection of sensor data, this documentation navigates through the intricacies of transmitting and storing this information on AWS IoT Core and AWS Analytics, respectively. It delves into the utilization of AWS Sagemaker to train machine learning models on normal environmental patterns, emphasizing the system's capability to learn and adapt to its operational context for enhanced efficiency.
+
+Furthermore, the Wiki outlines the implementation of real-time anomaly detection using the XIAO ESP32C6, a critical component that actively scans for deviations from the norm and swiftly triggers alerts. It encapsulates the end-to-end process of setting up an alerting mechanism that notifies stakeholders of abnormal conditions, ensuring prompt attention and action.
+
+
+
+### [Bluetooth usage with Seeed Studio XIAO ESP32C6](https://wiki.seeedstudio.com/xiao_esp32c6_bluetooth/)
+
+In this tutorial, we will focus on the basic features of the XIAO ESP32C6's Bluetooth capabilities, such as how to scan for nearby Bluetooth devices, how to establish a Bluetooth connection, and how to transmit and receive data over a Bluetooth connection.
+
+
+
+
+### [SenseCraft-HomeAssistant User Manual](https://wiki.seeedstudio.com/sensecraft_homeassistant_userguide/)
+
+SenseCraft-HomeAssistant is a plugin for HomeAssistant. By using this plugin, users can log in with the SenseCraft Data Platform (originally SenseCAP Cloud Platform) account to access cloud devices and sensor data on the HomeAssistant platform, generating custom device reporting dashboards.
+
+### [Create a Project(ESP-IDF) - SenseCAP Indicator](https://wiki.seeedstudio.com/sensecap_indicator_project/)
+
+This tutorial focuses on creating projects using the ESP32-S3 with ESP-IDF.
-[Getting start with reComputer J1020V2](https://wiki.seeedstudio.com/reComputer_J1020v2_with_Jetson_getting_start)
-[Getting start with reComputer J30/40](https://wiki.seeedstudio.com/reComputer_J30_40_with_Jetson_getting_start)
## Existed Wiki Updated
-### [Grove - EMG Detector](https://wiki.seeedstudio.com/Grove-EMG_Detector/)
+### [Grove - I2C Motor Driver (L298P)](https://wiki.seeedstudio.com/Grove-I2C-Motor-Driver-L298P/)
+
+If you encounter a situation where the PWM frequency cannot be changed and remains fixed at 24Hz, you can focus on this wiki to solve your problem.
+
+For detailed flashing instructions, you can refer to [this post](https://forum.seeedstudio.com/t/dc-motor-on-i2c-motor-driver-1-3-pwm-is-25hz-and-cant-be-changed/273244/18?u=seeed_seraphina)
+
+
-We have added a Tips for the part list of Grove - EMG Detector
-The part list of this product has been updated recently. You may receive connecting wires of two specifications, their functions are completely identical, only the colors are different,the corresponding relationship is shown in the diagram below.
-
-
-
+- Check on [GitHub](https://github.com/orgs/Seeed-Studio/projects/6) for more information.
+- We will be really appreciate if you can [share your ideas](https://github.com/orgs/Seeed-Studio/projects/6?pane=issue&itemId=35179519) with us!
## Past Weekly wiki
@@ -124,3 +146,4 @@ On this tutorial, we're going to explore several ways to deploy and run a local
- [weekly wiki on 2024.3.18th](/Seeed_Elderly/weekly_wiki/wiki240318)
- [weekly wiki on 2024.3.25th](/Seeed_Elderly/weekly_wiki/wiki240325)
- [weekly wiki on 2024.4.01st](/Seeed_Elderly/weekly_wiki/wiki240401)
+- [weekly wiki on 2024.4.08th](/Seeed_Elderly/weekly_wiki/wiki240408)
diff --git a/sidebars.js b/sidebars.js
index 00c2e3ad71a8..7d97feafcb61 100644
--- a/sidebars.js
+++ b/sidebars.js
@@ -741,10 +741,10 @@ const sidebars = {
],
},
'Sensor/SenseCAP/SenseCAP_T1000_Tracker/FAQ',
- 'Sensor/SenseCAP/SenseCAP_T1000_Tracker/Firmware_release_note',
+ 'Sensor/SenseCAP/SenseCAP_T1000_Tracker/Firmware_release_note',
],
},
-
+
{
type: 'category',
label: 'SenseCAP Sensor',
@@ -760,7 +760,7 @@ const sidebars = {
type: 'category',
label: 'SenseCAP LoRaWAN Sensor',
- items: [
+ items: [
{
type: 'category',
label: 'SenseCAP S210X Series',
@@ -1005,6 +1005,7 @@ const sidebars = {
'Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_RP2040/XIAO-RP2040-with-CircuitPython',
],
},
+ 'Sensor/SeeedStudio_XIAO/SeeedStudio_XIAO_RP2040/XIAO-RP2040-Zephyr-RTOS',
{
type: 'category',
label: 'Embedded ML',
@@ -2107,7 +2108,7 @@ const sidebars = {
},
],
},
-
+
{
type: 'category',
label: 'Helium Gateway',
@@ -2386,7 +2387,7 @@ const sidebars = {
'Network/RK_Devices/H28K/H28K-install-system',
],
},
-
+
],
},
@@ -2453,13 +2454,13 @@ const sidebars = {
'Edge/Raspberry_Pi_Devices/reTerminal/reTerminal-hardware-interfaces-usage',
'Edge/Raspberry_Pi_Devices/reTerminal/reTerminal-piCam',
'Edge/Raspberry_Pi_Devices/reTerminal/reTerminal-FAQ',
-
+
{
type: 'category',
label: 'Application',
items: [
-
-
+
+
{
type: 'category',
label: 'Home Assistant',
@@ -2490,7 +2491,7 @@ const sidebars = {
'Edge/Raspberry_Pi_Devices/reTerminal/Application/OpenCV/reTerminal_DM_Shape_detection',
'Edge/Raspberry_Pi_Devices/reTerminal/Application/OpenCV/reTerminal_DM-tracking',
'Edge/Raspberry_Pi_Devices/reTerminal/Application/OpenCV/reTerminal_DM_Object_detection',
-
+
],
},
{
@@ -2502,6 +2503,14 @@ const sidebars = {
'Edge/Raspberry_Pi_Devices/reTerminal/Application/Embedded_ML/reTerminal_ML_Edgeimpulse',
],
},
+ {
+ type: 'category',
+ label: 'Managed Services',
+ items: [
+ 'Edge/Raspberry_Pi_Devices/reTerminal/Application/Managed_Services/neqto_engine_for_linux_reTerminal',
+
+ ],
+ },
'Edge/Raspberry_Pi_Devices/reTerminal/Application/Mender-Client-reTerminal',
],
},
@@ -2556,7 +2565,7 @@ const sidebars = {
'Edge/Raspberry_Pi_Devices/reTerminal-DM/SenseCraft_Edge/reterminal-dm-sensecraft-edge-os-intro',
],
},
-
+
{
type: 'category',
label: 'Home-Assistant',
@@ -2618,7 +2627,7 @@ const sidebars = {
},
],
-
+
},
{
type: 'category',
@@ -2652,9 +2661,9 @@ const sidebars = {
},
],
},
-
+
],
-
+
@@ -2750,7 +2759,7 @@ const sidebars = {
// type: 'category',
// label: 'J202',
// items: [
-
+
// ],
// },
@@ -2758,7 +2767,7 @@ const sidebars = {
// type: 'category',
// label: 'J401',
// items: [
-
+
// ],
// },
@@ -2794,7 +2803,7 @@ const sidebars = {
{
type: 'category',
label: 'reComputer J1010',
- items: [
+ items: [
'Edge/NVIDIA_Jetson/reComputer_Jetson_Series/reComputer_J10/reComputer_J1010/reComputer_J1010_with_Jetson_getting_start',
'Edge/NVIDIA_Jetson/reComputer_Jetson_Series/reComputer_J10/reComputer_J1010/J101_Enable_SD_Card',
'Edge/NVIDIA_Jetson/reComputer_Jetson_Series/reComputer_J10/reComputer_J1010/J1010_Boot_From_SD_Card',
@@ -2856,7 +2865,7 @@ const sidebars = {
]},
-
+
{
type: 'category',
label: 'Other Devices',
@@ -2967,7 +2976,7 @@ const sidebars = {
'Edge/NVIDIA_Jetson/FAQs/Solution_for_the_Compatibility_Issue_between_reComputer_and_VEYE_Camera',
]}
-
+
// {
// type: 'category',
// label: 'reComputer Industrial',
@@ -3732,7 +3741,7 @@ const sidebars = {
]
},
-
+
],
},
@@ -4159,7 +4168,7 @@ const sidebars = {
'zh-CN/Sensor/Grove/Grove_Sensors/AI-powered/Grove-vision-ai-v2/cn-grove-vision-ai-v2-himax-sdk',
'zh-CN/Sensor/Grove/Grove_Sensors/AI-powered/Grove-vision-ai-v2/cn-grove-vision-ai-v2-sensecap-app',
],
- },
+ },
{
type: 'doc',
@@ -4373,7 +4382,7 @@ const sidebars = {
},
],
},
-
+
{
type: 'category',
label: 'XIAO 的兼容扩展板',