-
Notifications
You must be signed in to change notification settings - Fork 0
Home
superdjorik edited this page Feb 24, 2017
·
24 revisions
FabROV Wiki
Список оборудования подводного телеуправляемого аппарата FabROV:
- [Raspberry PI 3 Model B] (https://www.raspberrypi.org) - 1 шт. Захват видеоизображения, связь с землей, управление полетным контроллером.
- [Pixhawk PX4] (http://pixhawk.org/modules/pixhawk) - 1шт. Полетный контроллер с акселерометром, компасом, гироскопом.
- [3DR Power Module] (http://ardupilot.org/copter/docs/common-3dr-power-module.html) - 1шт. Регулятор напряжения. Непрерывная подача рабочего напряжения и тока, мониторинг напряжения аккумулятора.
- [Turnigy ESC AE-20] (https://hobbyking.com/en_us/turnigy-ae-20a-brushless-esc.html) - 4шт. Регуляторы оборотов двигателя.
- [Turnigy DST-700] (https://hobbyking.com/en_us/turnigy-aerodrive-dst-700-brushless-outrunner-motor-700kv.html) - 4шт. Бесколлекторные двигатели.
- [Raspberry PI Camera] (https://www.raspberrypi.org/products/camera-module/) - Камера 5MP 1080p
- Ноутбук с Ethernet портом.
- [Xiaomi Gamepad] (http://4pda.ru/forum/index.php?showtopic=696050) - Джойстик для управления подводным аппаратом.
Схема работы аппарата: тут схема
Схема установки двигателей в аппарате:
![Схема] (http://ardusub.com/images/simplerov-4.png)
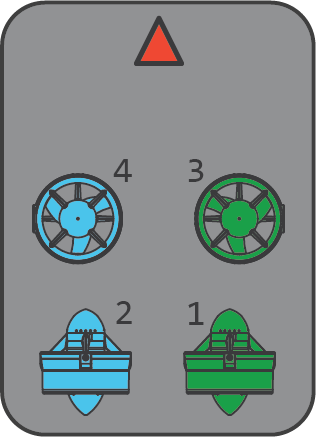{kind=link}
ПО для управления аппаратом: [QGroundControl] (http://qgroundcontrol.com/downloads/)
[Mission Planner] (http://firmware.ardupilot.org/Tools/MissionPlanner/MissionPlanner-latest.msi)