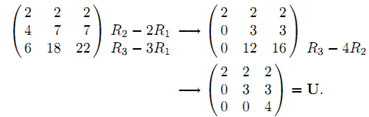

L 为 G3G2G1的矩阵的逆
https://blog.csdn.net/Zijie123pea/article/details/113813747 介绍了 LU 的 L 比较快的求解方法
full pivoting相比partial pivoting更加稳定,但是更麻烦,速度会慢。
Reference:
Ax = b 未必线性有解,即 A 不可逆,A-1无法计算,所以我们希望最小化 || Ax - b||2
Error 求导
可得
(ATA)-1也未必存在逆矩阵(underdetermined),所以才有 Tikhonov regularization
ATA 至少是半正定矩阵
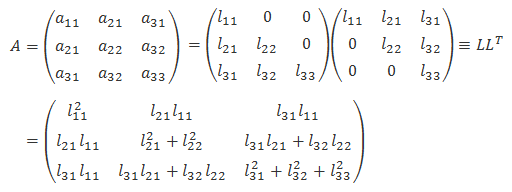
对于正定矩阵(A 的列向量线性无关)有 Cholesky 分解(为 LU 分解的特殊情况)
如
Reference:
计算过程重点看第二个
Newton’s Method: https://zhuanlan.zhihu.com/p/46536960
Secant’s Method: